Hi ِDear,
I build a fixed-wing drone.
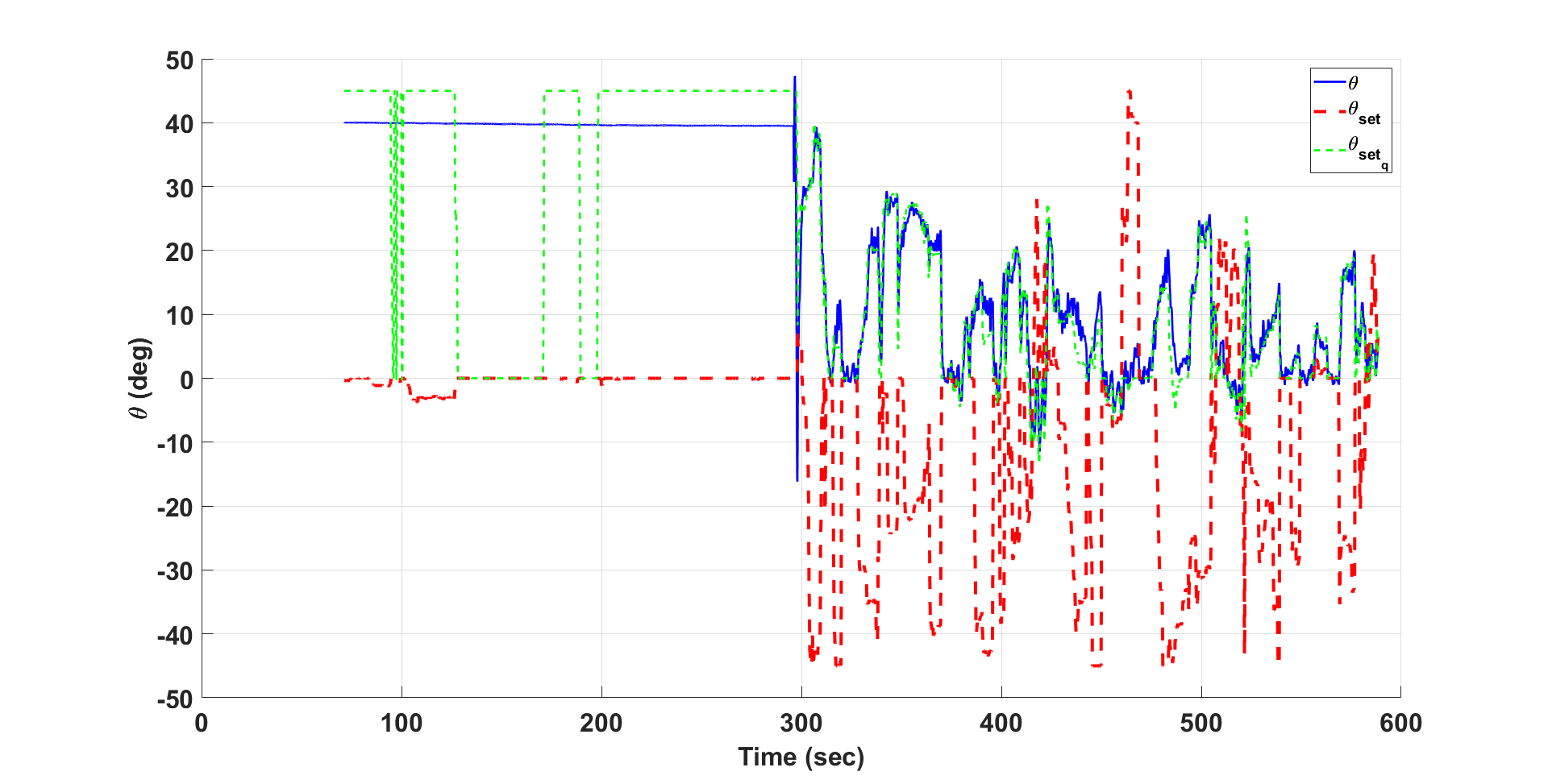
when I check the ulg I have a problem that there is the a difference between set-points.
it mean that when I plot the pitch and pitch set-point that save in control_state_0 and vehicle_setpoint_0 they are reverse and when I plot the pitch and pitch set point that calculated from set point quaternion they are match. it mean that pitch set point that save in the ulg and the pitch that calculated from quaternion are deference.
I want to thank you in anvance.