I’m using PlotJuggler and FlightPlot for log analysis. I managed to get almost everything I need compared to Flight Review tool.
I got Pitch/Roll/Yaw Rates Setpoint from vehicle_rates_setpoints
I got Pitch/Roll/Yaw Rates Estimated from vehicle_angular_velocity
I got Pitch/Roll/Yaw Setpoint from vehicle_attitude_setpoint
But I can’t find anything that matches Pitch/Roll/Yaw Angle Estimated in ulog file as it is shown in Flight Review tool.
Do I need some kind of formula to calculate it?
I tried to look at Flight Review sources ( https://github.com/PX4/flight_review/blob/master/plot_app/configured_plots.py ) and it was confusing because it seems like there should be fields called roll, pitch, yaw in ‘vehicle_attitude’ but there are only following fields: q[0],q[1],q[2],q[3],delta_q_reset[0],delta_q_reset[1],delta_q_reset[2],delta_q_reset[3],quat_reset_counter.
q[0],q[1],q[2],q[3] are somehow similar to Pitch/Roll/Yaw Angle Estimated but not the same.
So how do I get Pitch/Roll/Yaw Angle Estimated from my ulog files?
There’s also vehicle_local_position/yaw that is very similar to Yaw Angle Estimated. But not exactly, and there’s no Pitch or Roll fields.
Let me ping @facontidavide here, I’m sure he can help 
Let me ping @facontidavide again and hope for help.
I’m absolutely shure that there’s an answer because I can see angle estimated in Flight Review online tool, the first graph for roll. The only question is how do they get it from ulogs.
So I have an answer for my question.
For FlightPlot you should select vehicle_attitude/q[0],q[1],q[2],q[3] from field list, then select processor EulerFromQuaternion and voilà! you have Pitch/Roll/Yaw angles just like in Flight Review.
For PlotJuggler it’s more complex, you should implement the conversion with our own functions.
Thanks to wiki article, I made the following finctions in Lua.
QuaternionToRoll:
-- value is not used but should be mentioned to trick PJ check z = $$vehicle_attitude/q.00$$ y = $$vehicle_attitude/q.01$$ x = $$vehicle_attitude/q.02$$ w = $$vehicle_attitude/q.03$$ t1 = 2 * (w * x + y * z) t2 = 1 - 2 * (x^2 + y^2) return math.atan(t1, t2)
QuaternionToPitch:
-- value is not used but should be mentioned to trick PJ check z = $$vehicle_attitude/q.00$$ y = $$vehicle_attitude/q.01$$ x = $$vehicle_attitude/q.02$$ w = $$vehicle_attitude/q.03$$ sinp = 2 * (w * y - z * x) pitch = 0 if math.abs(sinp) >= 1 then if sinp >= 0 then pitch = math.pi / 2 else pitch = math.pi / -2 end else pitch = math.asin(sinp); end return (-1) * pitch
Here I had to invert pitch value to match Flight Review graph.
QuaternionToYaw:
-- value is not used but should be mentioned to trick PJ check z = $$vehicle_attitude/q.00$$ y = $$vehicle_attitude/q.01$$ x = $$vehicle_attitude/q.02$$ w = $$vehicle_attitude/q.03$$ t1 = 2 * (w * z + x * y) t2 = 1 - 2 * (y * y + z * z) return math.atan(t1, t2)
Yaw angle here is also inverted and has something like 180° offset, but I decided to leave it this way.
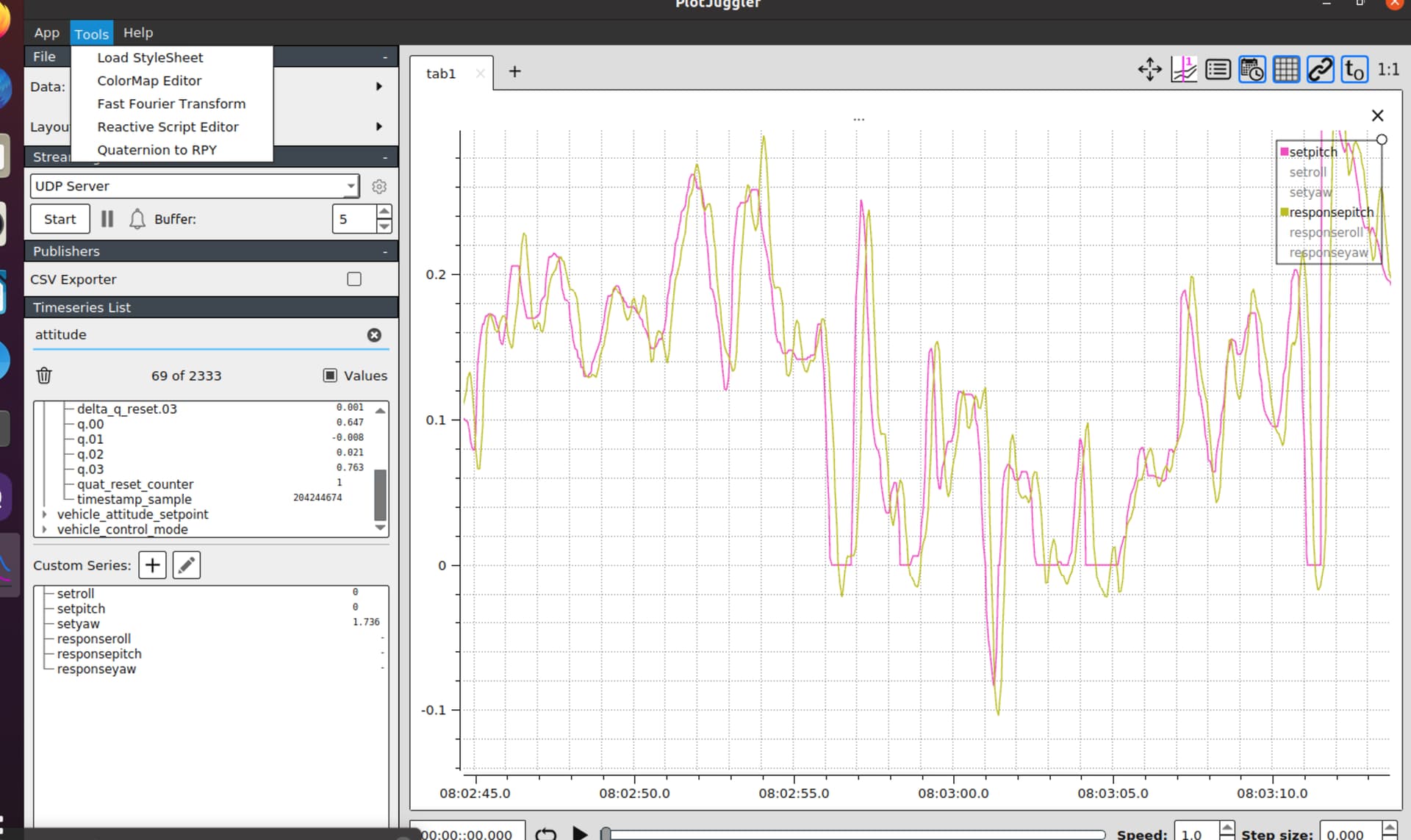
@facontidavide how to use plotjuggler to plot euler and his setpoint of XP4?
get it! You need to use the quaternion to RPY tool in tools to convert the quaternion to Euler angle and save it, then do the same operation on the quaternion of the attitude setting value to compare in a picture.