October 19, 2022
Join us
Agenda
- Community Announcement
- Community Q&A
- Project Updates
- General Discussions
- Weekly Overview
- High priority queue
- Release
 Community Announcement
Community Announcement
 Community Q&A (No deep technical discussions)
Community Q&A (No deep technical discussions)
 Guideline for asking a Question
Guideline for asking a Question
- Specify what you are trying to achieve
- Specify what environment / platform you are using
- Prepare a Link or Document to help understand if possible
- First, ask the question on the Slack or create a Github Issue!
- If you take over 5 minutes for the question, please continue in Slack or a Github Issue.
Q.1 : ROS2 mission upload feature
- @farhang just a follow up on ROS2 Mission push and if anything was not clear.
- Daniel: Need to settle the PR that removes Fast RTPS
- Resurrecting the uORB::Service PR would be best case, instead of accessing dataman (where Mission is stored) directly.
- @farhang check out this Discord thread to check an example of enabling ROS2 offboard control: Discord
- GitHub - Jaeyoung-Lim/px4-offboard: Example of PX4 offboard control over microdds using python ROS 2 · GitHub
Q.2 : Estimator health errors are too frequent - Chris
- GPS / Airspeed / Yaw estimate / Magnetic Interference, etc
- Daniel: Right now, there are couple of pre-arm checks that is running during flight (hence, spamming the GCS), the fix will get upstreamed soon.
This begs the question: “Is my estimator really unhealthy?”
Q.3 : Prioritization of external mag (with less mag interference) - Chris
- Wondering whether the primary mag is selected in a *smart way, judging by the mag data quality
- Alex: Multi EKF starts with internal mag by default, and doesn’t switch to external one (with less interference).
- Daniel: We already have the priority settings (via Param), but may be worth it to fix it up
Action Item:
- Let’s check if we can detect this case (via heading measurement, etc) to make sure estimator does switch to a better sensor data.
- @chris1seto will share a log on this
Q.4: Hexacopter, Cube Orange, PX4 1.13 - Auto takeoff issue - -Christoffer
- Take-off mode behavior: altitude is inconsistent (sometimes 2 meters, 10 meters, etc)
- Matthias: Right now, if the altitude is high enough, multicopter will try to maintain the yaw, and start yawing when going high.
- Could happen when yaw control authority isn’t enough / there’s a bias in yaw torque
- Relevant Discord thread: Discord
Action Item:
- Christoffer will create an issue and share a log and explain the situation.
Q.5: px4_ros_com rate limit? - Charles
- Actual limiting is easy. By having different uORB subscriptions
- Using odometry topic, etc
- Probably sth like
vehicle_angular_velocityeating up a lot of bandwidth
 Project Updates
Project Updates
P.1 : Airframe selection UI improvement

Currently, the Airframe selection UI is very broad / cluttered. @junwoo0914 is working on making it:
- Have cascaded structure
- From high-level (Vehicle type), down to low-level (Specific vehicle)
- Have that structure defined in the JSON, store it in the Flash, and fetch back in QGC as via Component Metadata protocol, to be always in sync
- previously, QGC displayed airframes not supported by the connected autopilot, since it’s not loading them dynamically
- Have more useful information included (Manufacturer info, Product URL, More images, Descriptions, etc)
The project outline can be found here:
You can view and tryout the Airframe JSON schema in this repository.
Current schema is like this, and example Airframe JSON is like this.
Will give an update as soon as I have the visual prototype (Qt application), to showcase the improved Airframe selection UI!
- Daniel: With mixers purged, airframe is more of a parameter set
P.2: NuttX backport merge is near - David
https://github.com/PX4/PX4-Autopilot/pull/20026
https://github.com/PX4/PX4-Autopilot/pull/20190
Netman is working in 20190 PR. After this, PX4 will haed towards NuttX version 11.
 General Discussions
General Discussions
D.1 : ROS2 compatibility & Docs update
With this PR being approved, we need to move on and update the docs. And put more effort in ROS2 compatibility support!
https://github.com/PX4/PX4-Autopilot/pull/20227
@Akshata created a PR in improving ROS2 docs, and we need to coordinate on this front.
- After having the CI builds settled, will get it merged
- Next step would be to build the PX4 jointly with ROS
- You can build a node using colcon with this PR: [WIP] uORB split topics and msg and full ROS2 compatibility by dagar · Pull Request #18911 · PX4/PX4-Autopilot · GitHub
- In ROS2, topics are represented in a “string”, and in uORB, it’s the ORB_ID enumeration.
Action Items:
- @junwoo0914 will follow up on standard_vtol CI failing reasons.
- Docs update: Fast RTPS mentions remove.
ROS2 messages compatibility issue
Right now, if you don’t build the PX4 with specific message set & ROS2 px4_msg module with different messages, we have differently interpreted message data.
Related discord field: Discord
Oopsy of the Week (3 weeks ago):
https://github.com/PX4/PX4-Autopilot/pull/20324
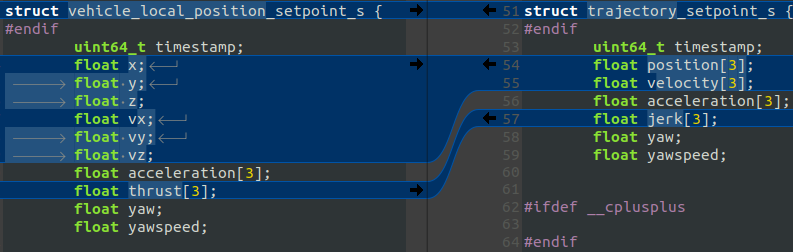
An effort to fix this uORB topic <> struct mapping problem was raised: uORB: Add struct <> ORB_ID assert check + Remove unnecessary files / add comments by junwoo091400 · Pull Request #20427 · PX4/PX4-Autopilot · GitHub
 Weekly Overview
Weekly Overview
 Github
Github
Pull Requests
*
Issues
*
 Slack
Slack
 Last Dev-Call
Last Dev-Call
High priority queue
Discussion based on: https://github.com/orgs/PX4/projects/24