November 29, 2023
Join us
Agenda
- Community Announcement
- Community Q&A
- General Discussions
 Community Announcement
Community Announcement
A.1: Holiday Break Schedule
Proposal to have a four-week break from community calls from December 18th to January 15th
 Community Q&A (No deep technical discussions)
Community Q&A (No deep technical discussions)
 Guideline for asking a Question
Guideline for asking a Question
- Specify what you are trying to achieve
- Specify what environment / platform you are using
- Prepare a Link or Document to help understand if possible
- First, ask the question on Discord or create a Github Issue!
- If you take over 5 minutes for the question, please continue in Discord or a GitHub Issue.
Q.1
ADS1115 ADCs on FMUv6X using 12S using PX4 v1.14
Answer: Please open an issue on GitHub we will get back to you (@dagar)
Q.2
https://github.com/PX4/PX4-Autopilot/issues/22456
Q.3
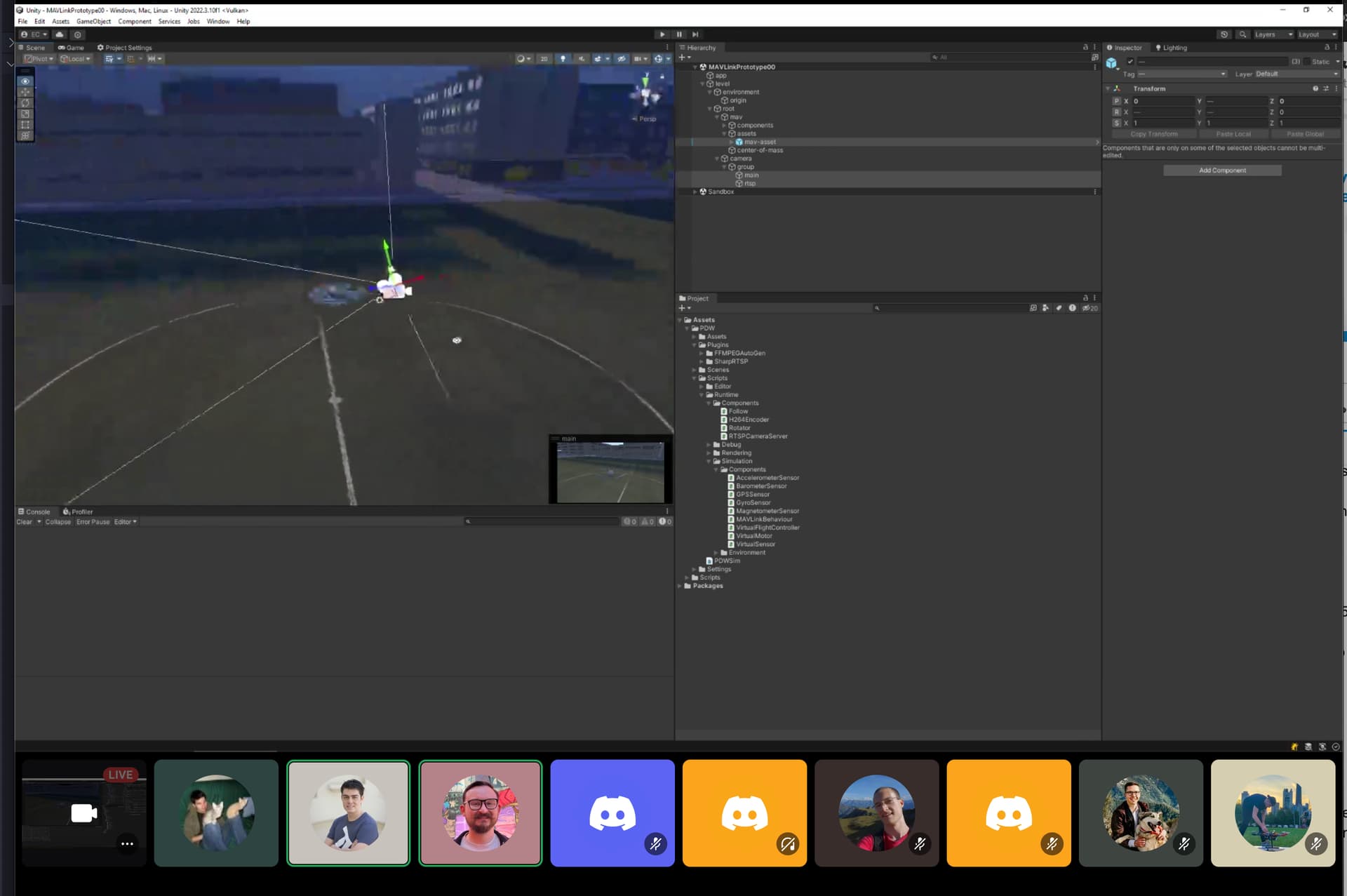
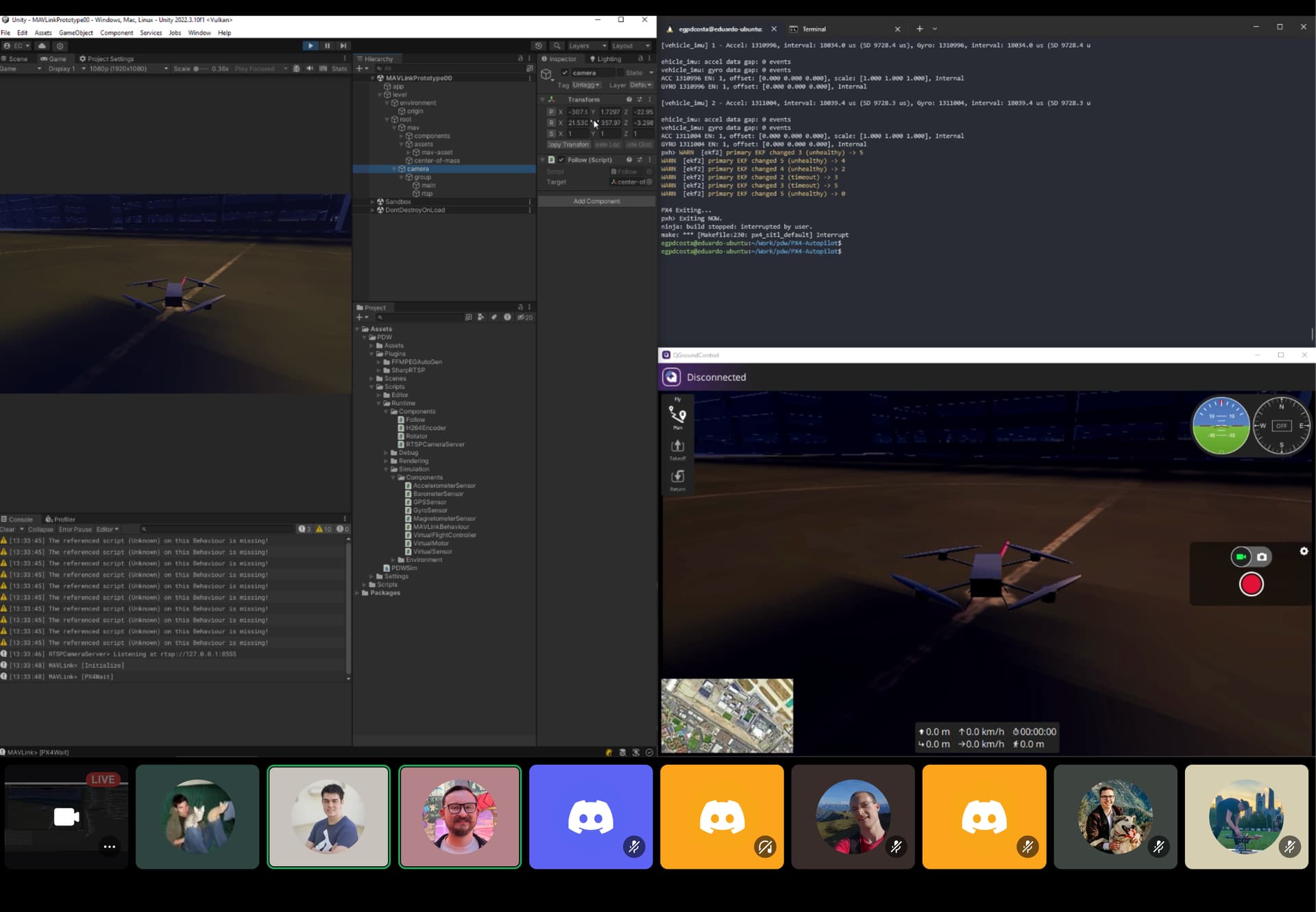
Eduarto-toptal: Built a simulator in MAVLink with PX4 using Unity. The drone is flying, but there are still some behaviors from unhealthy sensors that appear sometimes, and we would like to nail down what might be the cause.
Question: YAW is not working. How can we debug?
Answer: Please post a log and open an issue we can help debug. (@dagar)
Q.3 How do you write an Airspeed driver?
Answer: Look at the datasheet and ensure you understand all the data you need from the device. Once you get the basic driver infrastructure, we must define the new data that no other airspeed uses.
https://www.swiss-airdata.com/products/adp55