rroche
November 15, 2023, 6:01pm
1
Discord is great for playing games and chilling with friends, or even building a worldwide community. Customize your own space to talk, play, and hang out.
Community Announcement
Community Q&A
General Discussions
Specify what you are trying to achieve
Specify what environment / platform you are using
Prepare a Link or Document to help understand if possible
First, ask the question on Discord or create a Github Issue !
If you take over 5 minutes for the question, please continue in Discord or a Github Issue.
When Laser Range Finder (LRF) was not working, there were oscillations happening and altitude was not being kept.
Possible issue:
GPS data was not healthy
MPC Alt Mode was set to terrain hold, so maybe it goes to undefined state without LRF
Action Item: Will share log later (apparently flight review says it is corrupted and can’t open, but can open via PlotJuggler)
We have a large slow drone where we use a max velocity of 1m/s. After 1.13 we had to re-introduce smooth position control for the drone to work well at 1m/s. Are there any plans on making px4 compatible with slow drones?
Issue may not be fixed in v1.14, and on main it should be fixed - Matthias
https://github.com/PX4/PX4-Autopilot/commit/ff801fbc08e7b8453dd8c21768beceae591ea217
Relation to currently open PR:
https://github.com/PX4/PX4-Autopilot/pull/22102/files#diff-9aa90a2d3ce795bde10f2616d02754380f2004bbf9feec64586eb695bac18fc8R79
main ← scoutdi:accept-entire-distance-sensor-signal-strength
opened 12:38PM - 14 Nov 23 UTC
### Solved Problem
The reason for this commit is that we had a flight where t… he distance sensor was in practice disabled for large parts of the flight as the signal strength being read from the sensor was lower than 70/255 which is today's threshold. Looking at the sensor data itself we see that there were a lot of measurements with good quality that should not have been discarded.
See for example this section here where all data is discarded for more than 20 seconds even thought the sensor data is perfect

To explore where the limit should be, we set the minimal signal strength to 0 so that the signal strength is directly mapped to `distance_sensor/signal_quality`
What we saw from our experiments were that we only had outlier measurements where the signal strength was 0. Any non zero values corresponded to a good measurement. See comments below for plots
Looking at the datasheet we have the following documentation: https://static.garmin.com/pumac/LIDAR-Lite_v3HP_Instructions_EN.pdf

So signal strength is already capped with a lower threshold calculated based on the noise floor. From this its not unreasonable that all non-zero measurements are likely good.
Furthermore, at least for the terrain estimator, its not a problem if outliers are not removed at this step, as there already is outlier detection there. Is this also the case if the distance sensor is used directly in the EKF?
### Changelog Entry
For release notes:
```
Accept entire distance sensor signal strength
New parameter: None
Documentation:
```
### Test coverage
Flying again in the same location where the problem was first observed yielded good result where the distance sensor was used and no bad measurements were accepted.
### Context
Related links, screenshot before/after, video
Signal strength reporting sensor data
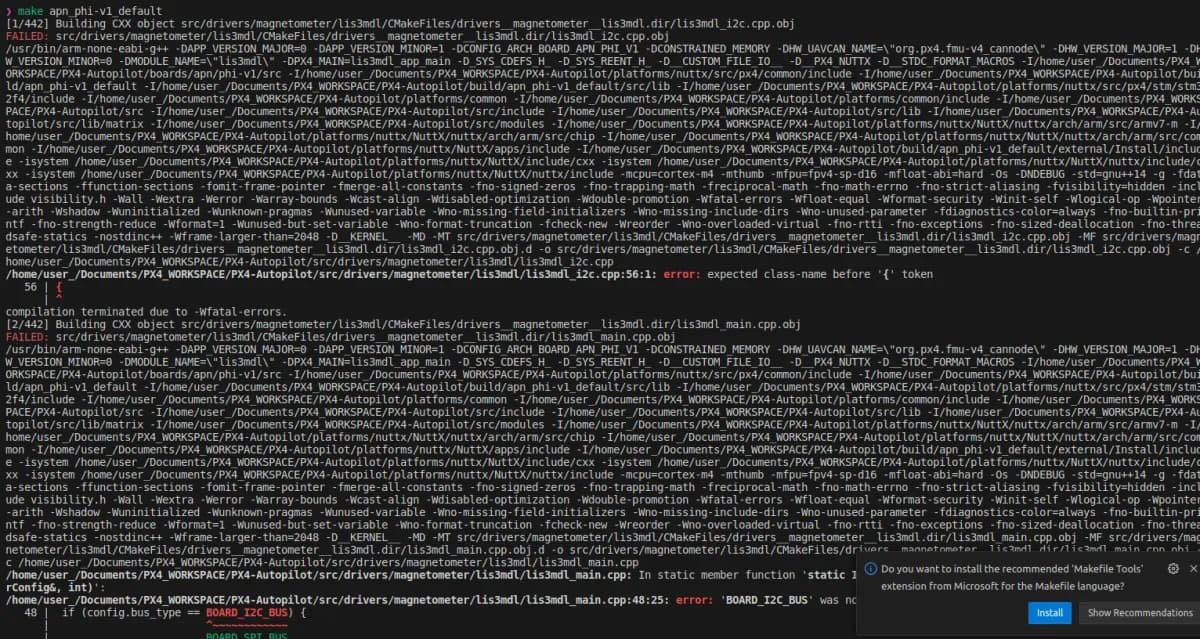
Daniel: Should check ‘defconfig’ file to chance the custom board dir value, like below
Remove all I2C stuff, then failure shouldn’t happen
Also remove I2C stuff from the CMakeLists
The config pointer:
When I2C stuff is removed, results in error regarding I2C. So need to also remove that part as well.
Windows crashes when running the container.
Use case: Want to change e.g. USART 1,2,3 into 0,1,2.
Currnetly NuttX configures so that USART ports get numbered automatically
Should be way to change NuttX config to change how serial numbering works out
Could be helpful:
Serial Port Configuration | PX4 User Guide (main) , we can select which serial ports to use for MAVLink telemetry, GPS, OSD, etc. by their conceptual “TELEM x” (x being 1, 2, 3, or 4) ports.
parameter reference , we can also select “GPS x” (x = 1, 2, or 3), or even Radio Controller, Wifi Port, and EXT2.
[image]
I can understand that…
We have a large slow drone where we use a max velocity of 1m/s. After 1.13 we had to re-introduce smooth position control for the drone to work well at 1m/s. Are there any plans on making px4 compatible with slow drones?
 Community Announcement
Community Announcement Community Q&A (No deep technical discussions)
Community Q&A (No deep technical discussions) Guideline for asking a Question
Guideline for asking a Question