Discord is great for playing games and chilling with friends, or even building a worldwide community. Customize your own space to talk, play, and hang out.
Community Announcement
Community Q&A
General Discussions
Specify what you are trying to achieve
Specify what environment / platform you are using
Prepare a Link or Document to help understand if possible
First, ask the question on Discord or create a Github Issue !
If you take over 5 minutes for the question, please continue in Discord or a Github Issue.
Hi Teams,
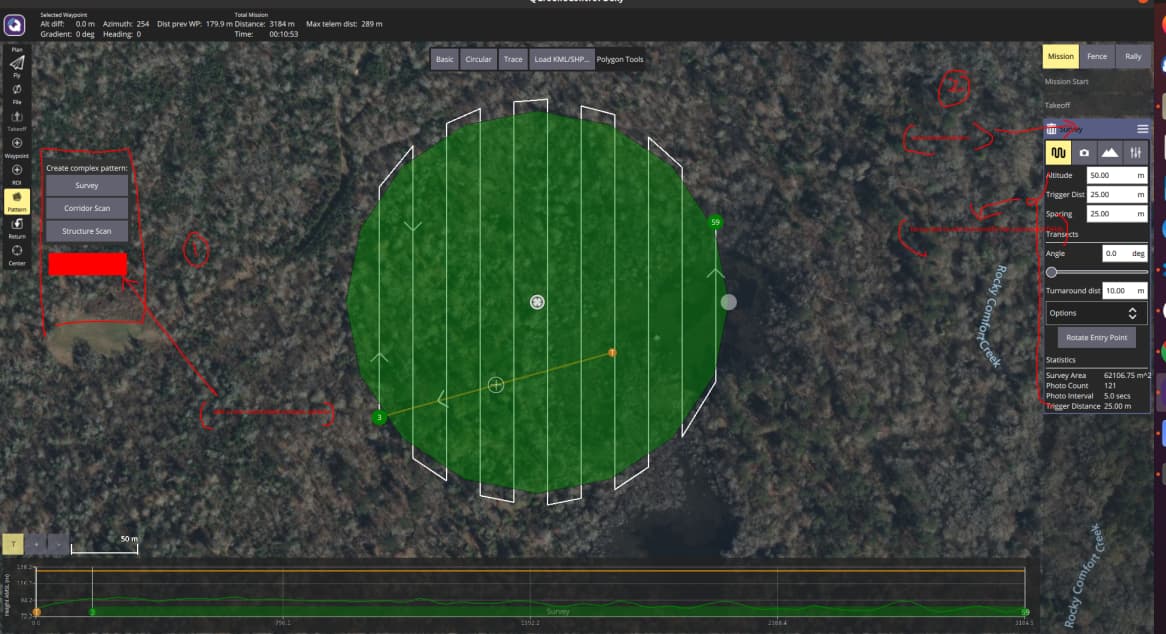
I am trying to implement a new complex pattern with features of adding new customized fields, so that the saved KML file from this pattern could fit our flight task (such as object avoidance, detection).
I used docker container and vscode as building and developing environment.
here is the pictures of my intended implementation:
[image]
3.(1): add a new complex pattern in the pattern section
3.(2): input the data into the customized fields such as model, confidence thres…
Using phone/watch controlled drone, and for that KML is being used as from google map for QGC.
Currently planning a mission that can have obstacle avoidance confidance level within the plan itself.
Currently migrating the project’s custom code/gui to QGC now, that’s why the custom KML fields part is needed.
Answer: Tag/Ping ‘Don Gagne’ (in discord & github) for better overview / comments!
Thread created: Discord
main ← SalimTerryLi:pr-posix-pxh-console-refactor
opened 11:53AM - 11 May 23 UTC
### Changes
- bring the modified source of linenoise in-tree
- server_io.cpp… added new get_stdin() method, which is primarily used by uorb top. Now uorb top can work with MavShell inputs
- apps.cpp.in use PX4_INFO_RAW() to ensure all outputs go into thread stdout, which will be redirected to its real location
### Improvements
- MavlinkShell won't dup2() on original stdio, thus will not mess the real terminal
- use of the linenoise makes it much easier to implement advanced terminal functionaliies
Now the console can be gracefully shutdown, but further cleanups still can not be performed until per-thread graceful shutdown is implemented.
### Test coverage
- works on native arm64 RPi 4B
- `make px4_sitl gz_x500` works on x64 with Linux Mint 21
- `make px4_sitl jmavsim` and `make px4_sitl gz_x500`works on Intel MacBookPro 2017 with macOS 12.6.5
For the ‘linenoise ’ repository, let’s fork it to be under PX4 organization in Github, or direct copying into the code tree.
It’s here! >>> PX4-Autopilot/src/modules/mavlink/CMakeLists.txt at main · PX4/PX4-Autopilot · GitHub
Also need to deal with the license properly (BSD-2).
For the submodule-induced CI error, check the other submodule’s case for CMakeLists: There are some cmake commands for setting up this dependency!
main ← SalimTerryLi:pr-pca9685-maintaince-update
opened 11:05AM - 30 Apr 23 UTC
This PR fixes `pca9685_pwm_out`. Now it should works again.
Blocker #20594 go… t merged.
#### Fixed things:
- Parameters for setting PWM frequency
- May looks better now, comparing to what I've done years before...
#### Imporvements
- Move scheduling rate from cmdline argument into parameters
- Support output duty-cycle signals per channel
- Support configuring CLK source of PCA9685 with Kconfig
- Now it should be able to act as an alternative to the old `pca9685` module, which is deprecated in 0e2df5a
#### Test Coverage
- RPi 4B with my expansion board using PCA9685 as main output
- CUAV pixhack v3 with PCA9685 connected to I2C1
Has it been flight tested? No, but it is driving LEDs properly.
Why would we want to use external crystal for clock for this driver? Less drift.
If a user can start the board, go to actuators configuration tab in QGC, and it works when user configures it.
Action Items:
Make sure it actually works
User configuration works
Hi Teams,
I am trying to implement a new complex pattern with features of adding new customized fields, so that the saved KML file from this pattern could fit our flight task (such as object avoidance, detection).
I used docker container and vscode as building and developing environment.
here is the pictures of my intended implementation:
3.(1): add a new complex pattern in the pattern section
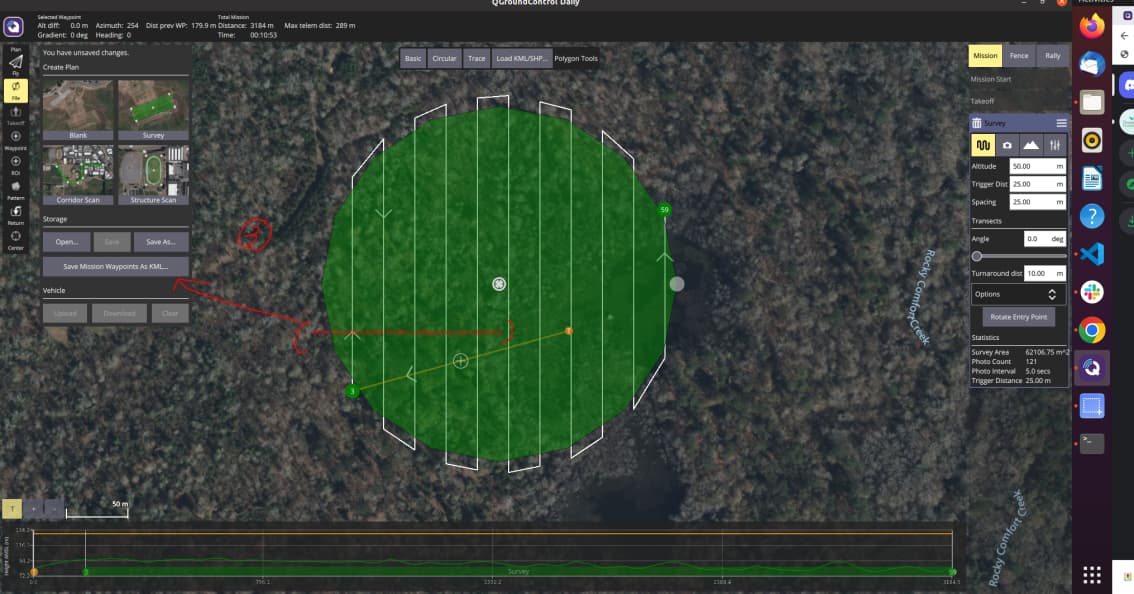
3.(3): save the pattern in a KML file which it stores the inputted data in step (2).
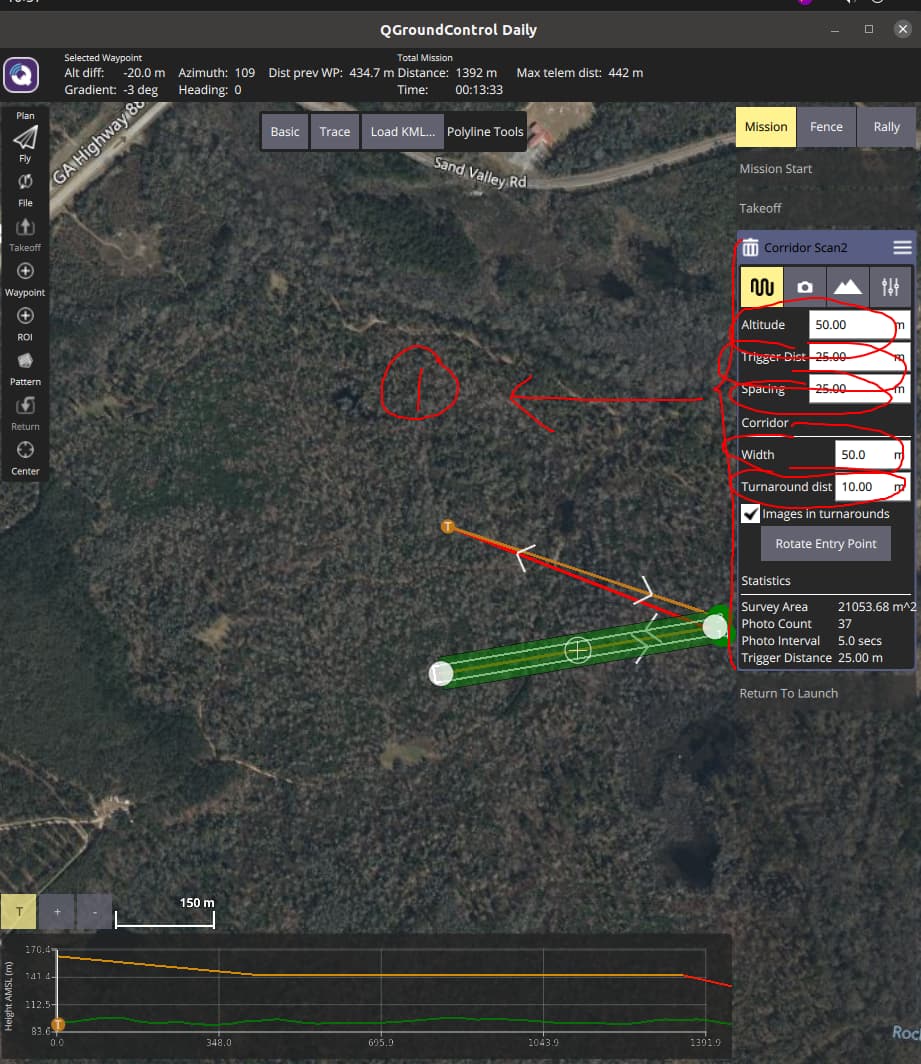
I am new to QT and QGroundControl. I am currently being able to mirror a same complex pattern as Corridor Scan. But I don’t know how do I modify and insert the fields on the right hand side in the mission section, and make my kml file generated the way I modify the fields. Any help would be much appreciated.
4.(1) add some new fields like confidence threshold for object detection, flight mode and so on. And make saved KML file also have those inserted field parameters.
 Community Announcement
Community Announcement Community Q&A (No deep technical discussions)
Community Q&A (No deep technical discussions) Guideline for asking a Question
Guideline for asking a Question