Hi Teams,
-
I am trying to implement a new complex pattern with features of adding new customized fields, so that the saved KML file from this pattern could fit our flight task (such as object avoidance, detection).
-
I used docker container and vscode as building and developing environment.
-
here is the pictures of my intended implementation:
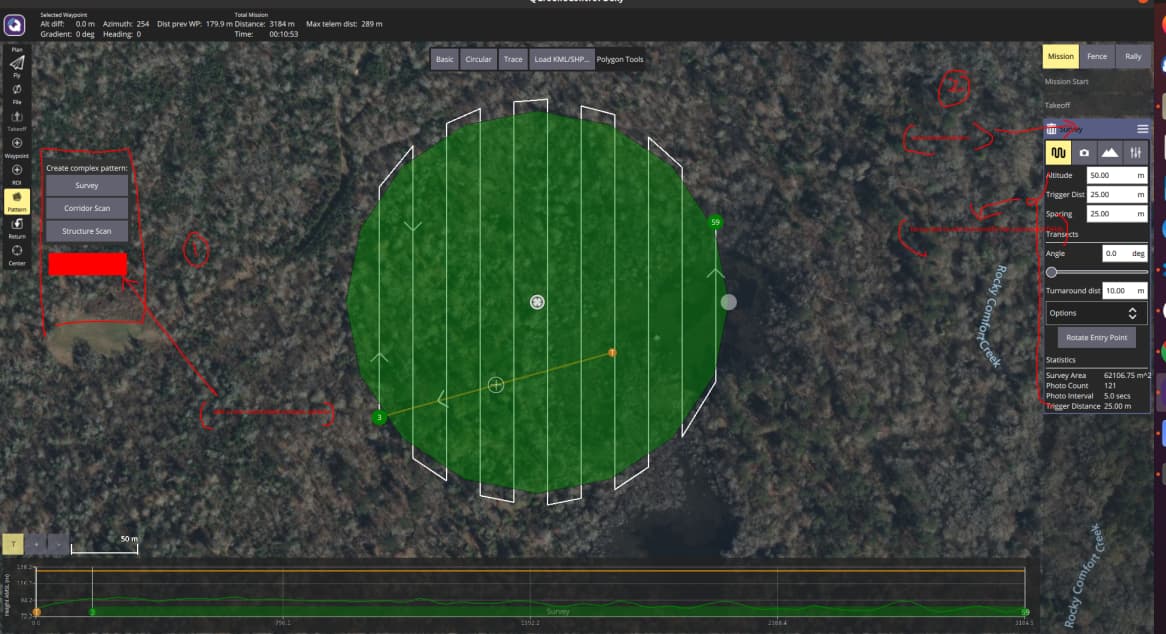
3.(1): add a new complex pattern in the pattern section
3.(2): input the data into the customized fields such as model, confidence threshhold
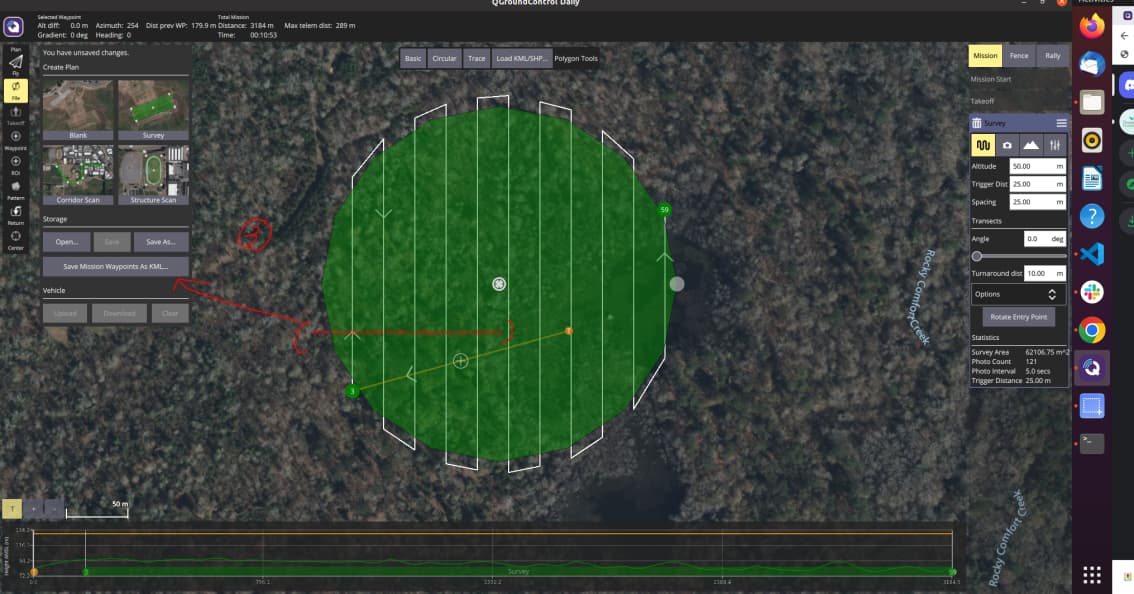
3.(3): save the pattern in a KML file which it stores the inputted data in step (2).
- I am new to QT and QGroundControl. I am currently being able to mirror a same complex pattern as Corridor Scan. But I don’t know how do I modify and insert the fields on the right hand side in the mission section, and make my kml file generated the way I modify the fields. Any help would be much appreciated.
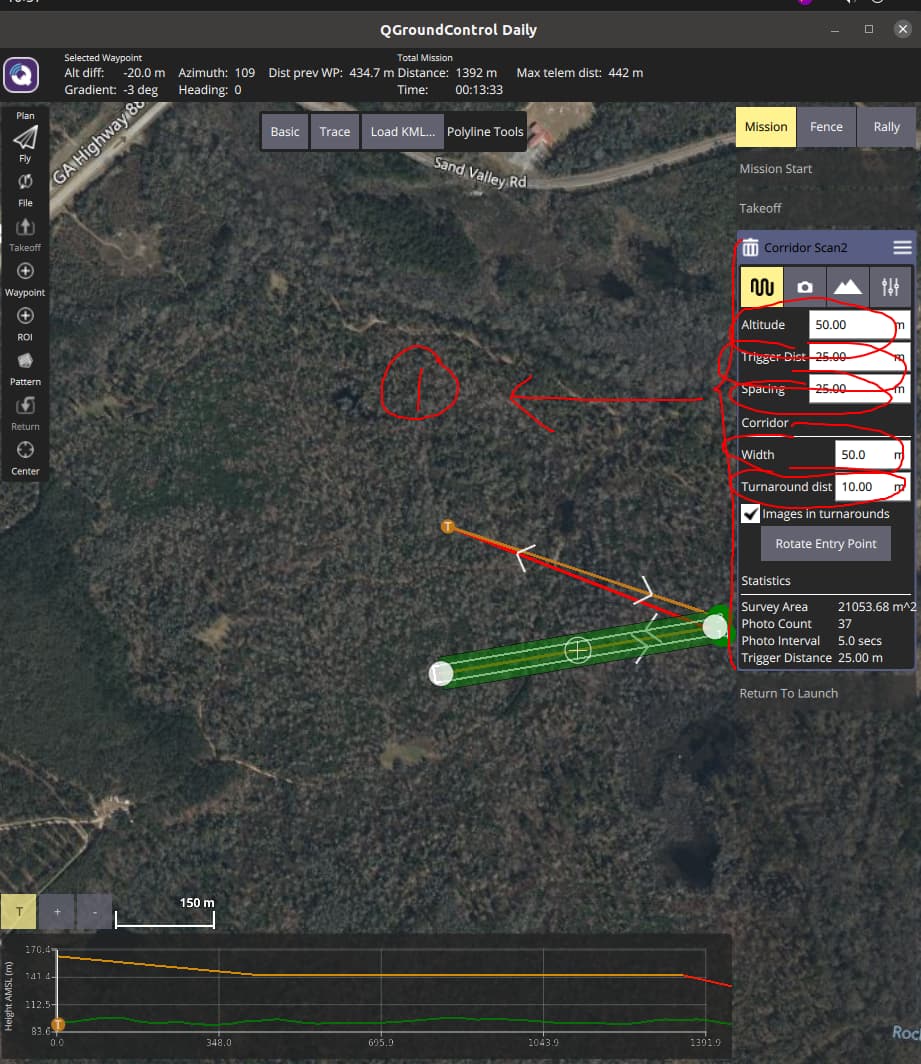
4.(1) add some new fields like confidence threshold for object detection, flight mode and so on. And make saved KML file also have those inserted field parameters.