Hi PX4 community,
Project summary:
Haedware:
FCU: Pixhawk4
Firmware Version: 1.11.3
Companion computer: Jetson Nano
Realsense camera T265
Realsense camera D435
Summary:
I am using T265 camera with Auterion ROS package as a VIO (GitHub - Auterion/VIO: Interface PX4 with Realsense T265) for indoor navigation and D435 camera as local planner (PX4 avoidance).
When I test the packages separately, both the packages are working correctly. However I want to run VIO package and PX4-Avoidance at the same time to meet the project objective.
First I run VIO package with :
roslaunch px4_realsense_bridge bridge.launch
and then run:
roslaunch local_planner avoidance.launch
When I run local_planner , it is crash and stop VIO .
The result of the terminal is like this :
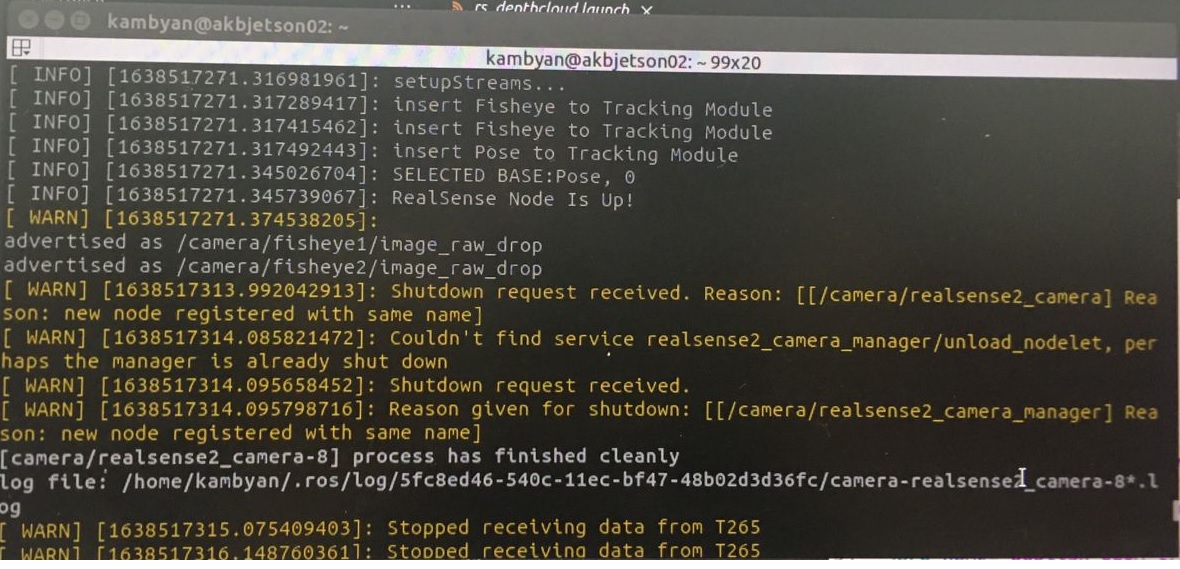
Could you please adviser me if anyone had this issue ?
Thanks in advance