I’m trying to use GitHub - PX4/PX4-Avoidance: PX4 avoidance ROS node for obstacle detection and avoidance. package.
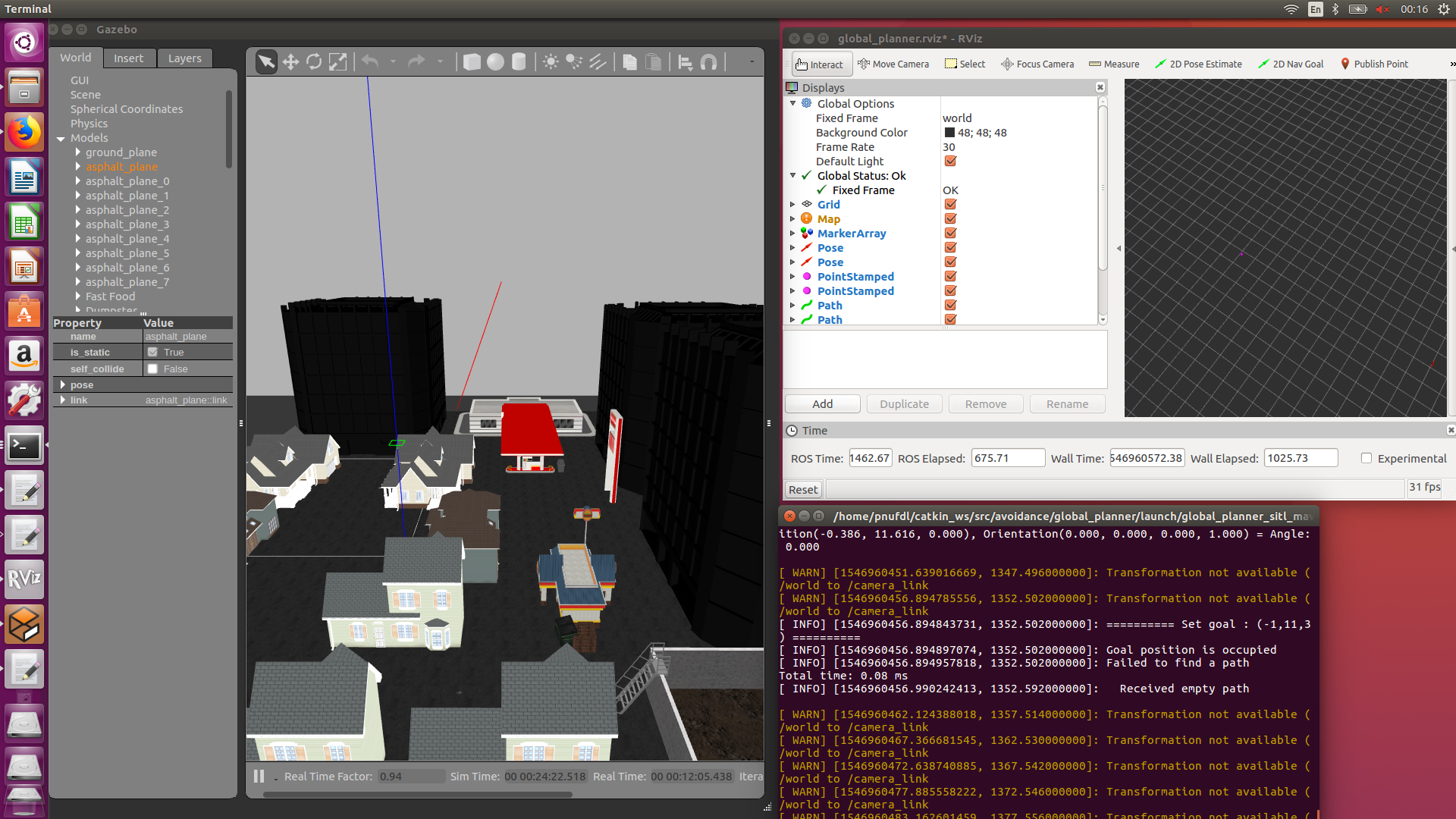
when I run the ‘roslaunch global_planner global_planner_sitl_mavros.launch’, i got the screen below. I think this is not perfectly run, what should i do? Please help me