Hello,
Our team discovered some strange behaviour lately. Changing flight mode to any “auto” mode causing throttle reducing to 0, finally causing crash.
Our flight stack is:
- CubePilot Orange+
- PX4 v. 1.16.0 (RC)
- V-Tail Fixed wing with single motor
Case:
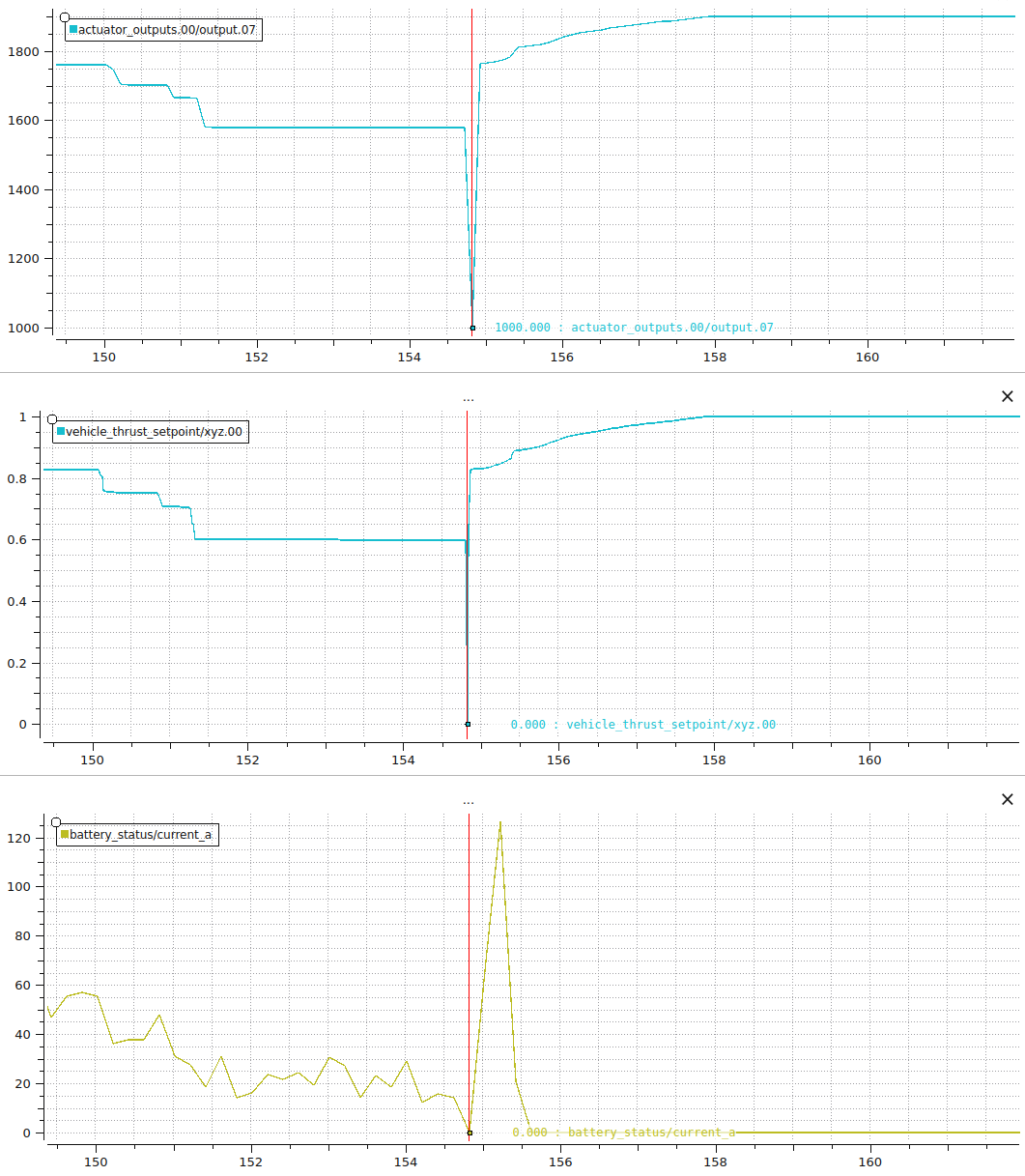
UAV is starting from catapult in Manual mode, changed to Stabilized during flight without any issues. Changing mode to RTL caused motor fully stop despite motor output was 1 during this mode. All other actuators remained unaffected, stabilizing flight and controlling angular position and heading. Changing mode back to stabilized returned full control over throttle to pilot. After aceleration we tried to start mission flight but after changing mode similar behaviour occur. Motor stopped, but changing mode back to stabilized change nothing and motor was not starting againg causing crash.
Our flight log:
We where able to reproduce almost identical behaviour couple of times on table, without props. Starting mission from Armed state was ok, motor was spinning, but mode change while forcing “Flying” state (blowing into pitot tube) couple of times caused same problem (motor stop, sometimes regains control after mode change, sometimes not). We tried changing output ports on autopilot, connecting servo instead of motor to see if it changes position and it looks like autopilot stops transferring pwm values to output.
Unfortunately we are unable to identify the cause of such behaviour so we highly appreciate your help with this issue.
Thanks in advance.