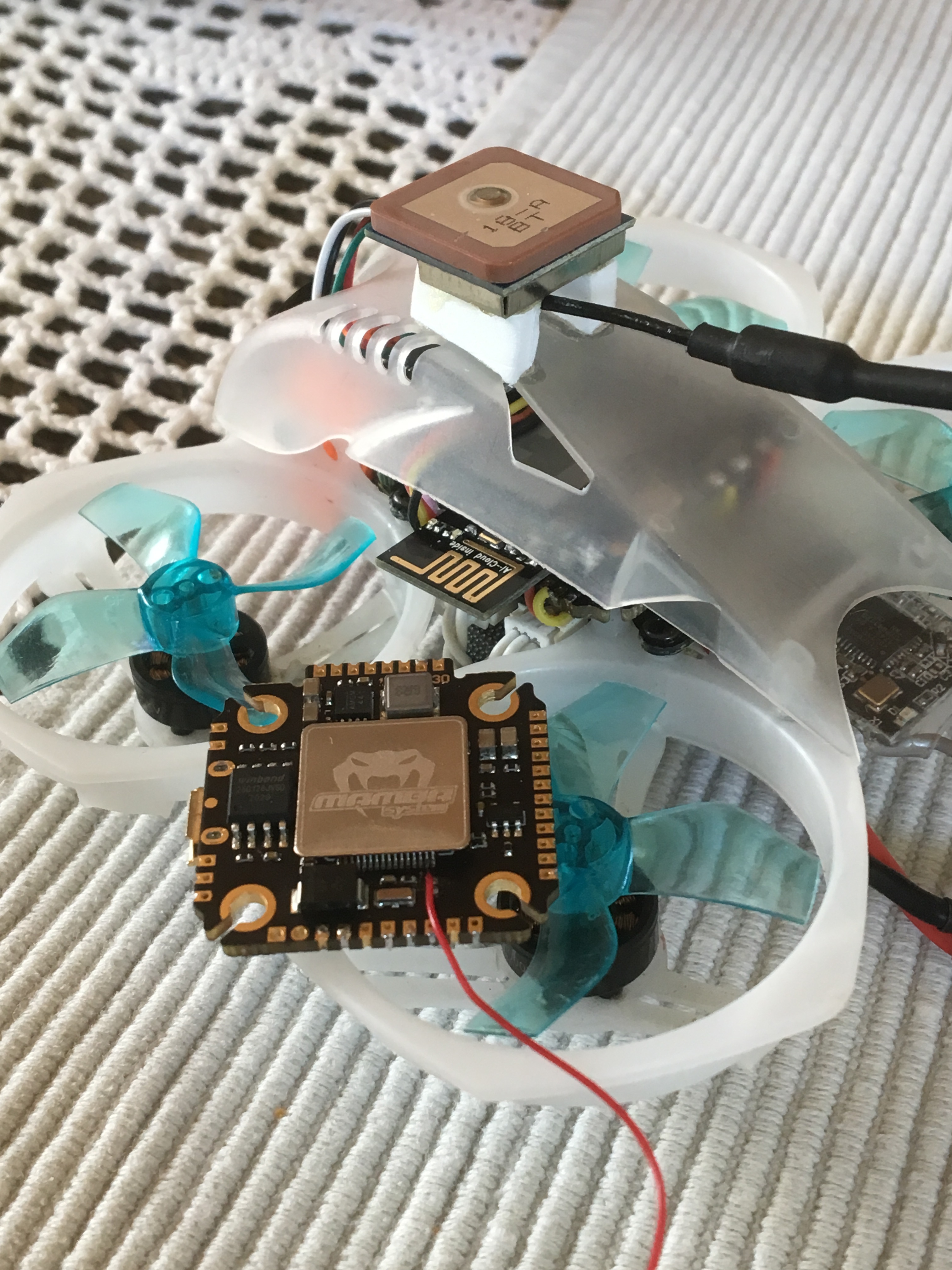
Now flies perfectly incl. pos and rtl with the following adjustments to the Omnibus Target to make it run on Mamba F405 mini mk2 (20x20mm):
PWM/Dshot order of outputs
SPI assignment of OSD, sensors and Flash
For RC, GPS and I2C (external baro+mag) there are already corresponding terminals that all work great.
Only 2 things are still to be done:
for Wifi telemetry the pin for UART 4 RX PA01 is missing, no breakout. PA00 (TX) is available on the LED pin.
The only connector still available on the board is C02
→ can UART 4 RX be changed to PC02 in the code?
There is no sd slot in such a small fc, but there is a 25w128 16mb flash on the spi connection of the sd.
→ how can I activate this flash ? (the driver for this is already available in NuttX).
I came up with Mamba F405 Mini Mk2 because the drone comes with a Matek F411 that is unsuitable for PX4 and the Mamba offers the most pinouts in it´s size.
… That’s true, it would be nice to be able to assign all pins almost freely within PX4 as it is in Betaflight. But the Betaflight CLI of this controller helped a lot to get together what works already. And this thing flies great both indoors and outdoors in the strongest winds.
In theory, it’s not that difficult, you can take the detailed pin assignment from the NuttX default stm32f4xxx_pinmap.h and enter it into board.h. But already from the stm hardware site, uart 4 is fixed to A1,A0 or C11,C10 … RX on C02 would never be possible even with Betaflight … connection and basic telemetry functions seem to work even without RX pin, I´ll give it a try.
But currently it always climbs to at least 30m even if RTL_RETURN_ALT is only 15m.
All other altitude settings like RTL_DESCEND_ALT are already below 10m.
With these short flight times, it would be nice to be able to set a lower RTL altitude or have I missed something?
An analog video to h264 encoder (Vivotek VS8100) is used to get the composite video out form the preview 5" receiver/screen to QGC V3.xx (V 4.xx latency is still to high for fpv flying).
QGC iOS 4 offers virtual joystick center throttle for los flying by smartphone.
That´s right (ESP 01) and after a sucessful flashing all pins got removed and the 3.3V from the boards fmu is enough to power it and also the rest of the external sensors like gps.
Only the baud rate of 921600 has to be reduced to 230400 cause the rxdma channel of this uart (4) is already in use by dshot otherwise not flyable by QGC´s virtual joysticks.
There is a new fc which now fulfils exactly all functions without any restrictions.
Matek H743 mini 20x20mm board with plenty of uarts and uavcan breakouts with enough flash and ram. The PX4 h743 slim target runs perfect. http://www.mateksys.com/?portfolio=h743-mini