I’m interested in helping improve airship support in PX4 and would appreciate maintainer/community guidance before preparing any PRs.
I reviewed the existing Airship/Cloudship work. Cloudline’s contribution seems to have been an important first step: it introduced the initial PX4 airship path, the Cloudship airframe/model, startup structure, and Gazebo Classic simulation reference.
PX4’s current airship documentation describes airship support as experimental and welcomes maintainers, new features, new frame configurations, and other improvements. I would like to build on the existing work in a maintainable and vendor-neutral way.
My initial idea is to contribute a generic reference airship model, possibly named Generic Airship / generic_airship, while preserving the existing Cloudship work as useful historical/reference material unless maintainers prefer another approach.
I would appreciate feedback on three points:
Would PX4 prefer a new generic airship model alongside Cloudship, or a gradual rename/deprecation path?
Is generic_airship a reasonable name for this kind of reference model?
What would be the most useful first contribution: documentation cleanup, modern Gazebo simulation, or controller/control-allocation work?
Thanks again to the original contributors for getting airship support into PX4. My goal is to help continue that work in a way that is useful for the broader PX4 community.
Update: I’ve opened a first PR toward this — PX4-Autopilot #27517 — restoring the Cloudship’s tail-thruster yaw.
The tail thruster was the yaw actuator in the original (2020) mixer, but became unused after the move to control allocation: manual passthrough leaves lateral thrust at zero, and since the tail thruster is the only lateral-force actuator, the allocator drives it to zero. The PR adds a small airship actuator-effectiveness so the tail thruster drives yaw again. Bench-tested on a Cube Orange.
One thing I couldn’t verify: my test rig only spins the tail thruster in one direction, so the reverse yaw direction is untested. If anyone has a Cloudship with a reversible tail ESC, I’d appreciate help confirming it.
Feedback welcome — meant as a concrete first step toward broader airship support.
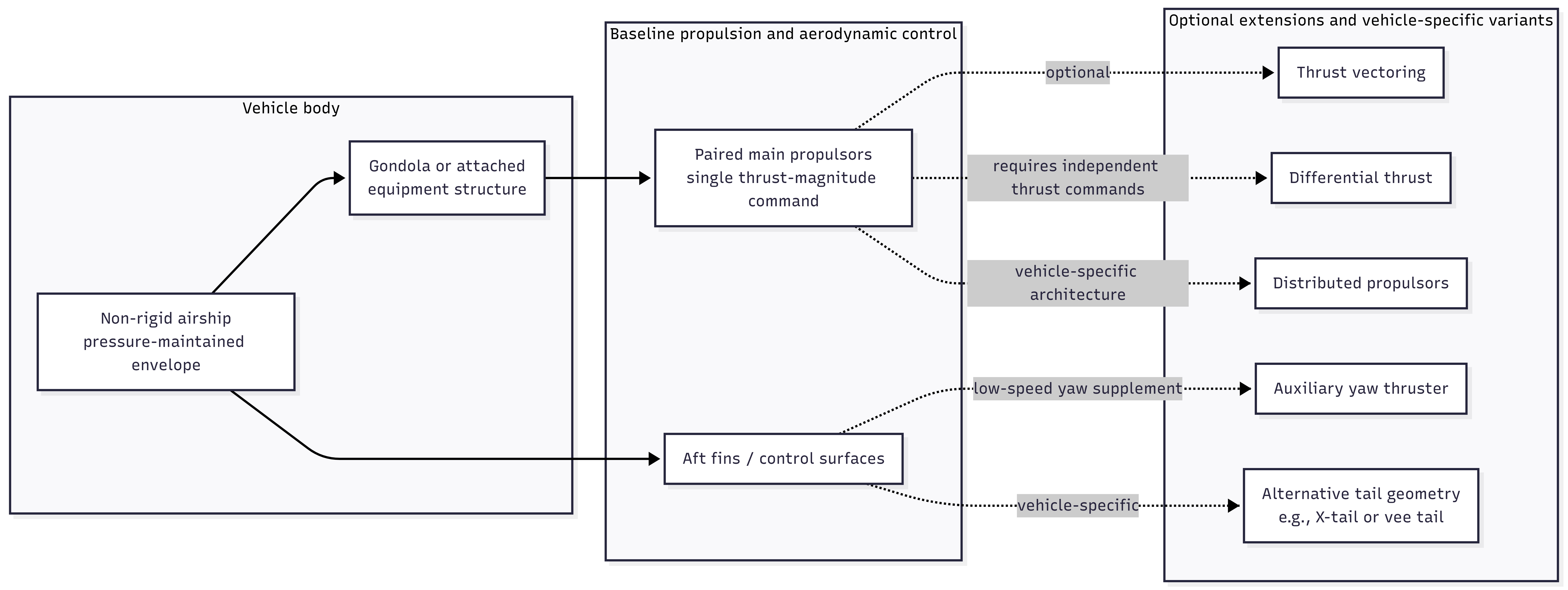
Update: Opened PX4-Autopilot #27697 — a first generic airship airframe: a cruciform tail (two forward thrusters + two elevators / two rudders), config-only on the existing manual-passthrough stack, bench-verified on a Cube Orange.
Adds an fmu-v6x build variant that compiles the airship stack
Each one is self-contained and can be reviewed on its own; the only planned link is that I’ll later revise the generic frame (#27697) onto #27517’s CA_AIRFRAME 16.