Partially answered here: PX4 Crash - HolyBro X500 - First drone build - #23 by bresch
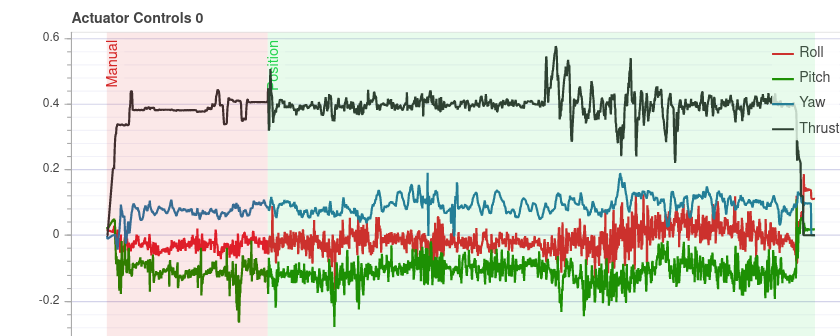
Also, this isn’t great: the drone is tail heavy and constantly fights for yaw (this creates a lot of vibrations). You need to move the battery forward and to align or tilt the motors to get those signals more centered around zero.