Hello everyone,
I am using the ready to flight kit of X500 by holybro and I have some problems when I switch to mission mode.
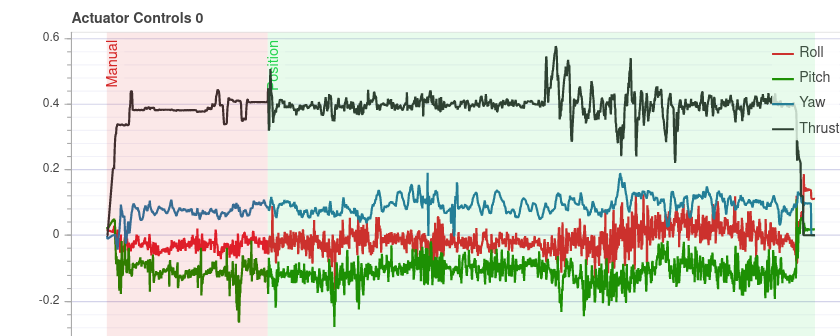
First, I would to say that all is perfect in manual mode : no oscillations. Just a little derivation I can’t explain… I think that my PID tuning is fine (I am using the default given with Holybro S500 Airframe Reference)
Than, I would to try to do a fully automatic fly with QGC. My plan is good but on a transects the drone is losing altitude (on the verge to crash if I don’t switch back to Manual flight mode). Moreover, Position mode seems to be bizarre with a lot of derivation, a yaw deviation and some oscillations on the tilt…
I send you two different logs : the first is the problem I describe, the second is a test in position mode.
Thank you in advance for your help !
Regards