Hi,
I am working on integrating Precision landing on a multicopter by using IR-lock, I am having a problem with the detection of the IR-beacon in-flight. The material I’m using is:
- Holybro X500 (drone)
- Pixhawk 4
- PX4 stable flight stack
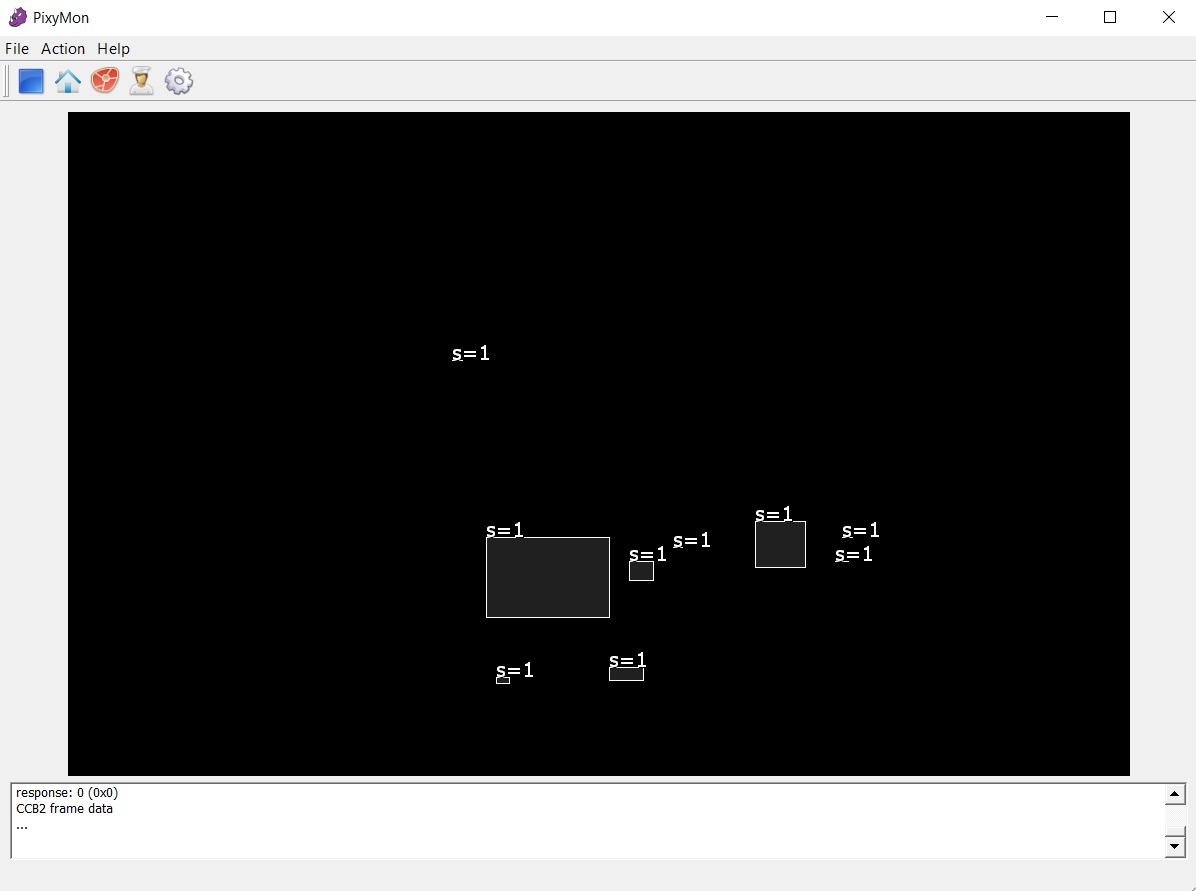
- IR-lock pixycam (pixycam with an IR filter)
- Mark 1 beacon (IR beacon)
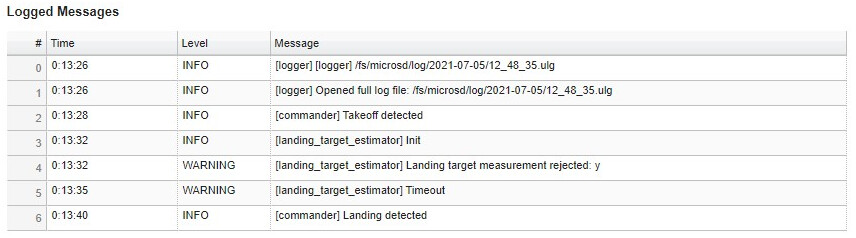
I have mounted the pixycam under the drone and performed a test flight. The test was to start both the IR-lock driver and landing_target_estimator module in the MAVlink console in Qgroundcontrol. Then put the powered Mark 1 beacon on the ground, then do a manual takeoff in stabelized flight mode, and hover over the beacon so the pixycam finds and loses the beacon multiple times. The desired observation would have been to see the landing_target_estimator initialize in the console in Qgroundcontrol and after 5 seconds of the pixycam not detecting the beacon to see the landing_target_estimator timeout. However, the actual observation was that the first time the drone hovered over the beacon, the landing_target_estimator initialized but directely after this, a warning was given that said “landing target measurement rejected:y” and 3 seconds after this, the landing_target_estimater timed out (I attached a figure of the logged messages). When hovering over the beacon again in the same flight, the landing_target_estimator did not initialize again (I have attached a link to the flight review of this test). I did not initiate the precision landing flight mode in this test flight. the result of this problem is that when i do start the precision landing flight mode, it does not detect the beacon and cannot perform a precision landing.
Is someone able to recognize what it is that i am doing wrong and help me?
https://review.px4.io/plot_app?log=8dfaca4a-77b4-4e96-8f1e-984cc323f03b