Thank you @bresch for your attempt.
I have edited the mixer configuration already because the servo placement difference in the blade 130x and the T-REX 250. Blade 130 uses 140 degree swash plates, and the T-REX 250 uses the 120 degree swash plates according to my knowledge. Accordingly I edited the mixer file. The changes made are the servo angles, throttle and pitch curves according to the Data sheet of T-REX 250. I have attached a screenshot of the mixer file which is placed on the Micro SD card for the PixRacer: 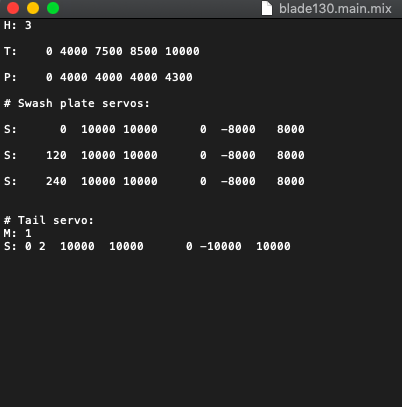
I fear that the rudder servo might need to be re-configured because of the direction as the 130 and T-REX 250 do not share the same placement positioning of the rudder servo so I will be looking in to reversing the rudder servo signal.
Thank you for your guidance and help.
Regards,
Junaid.