Hello dear community,
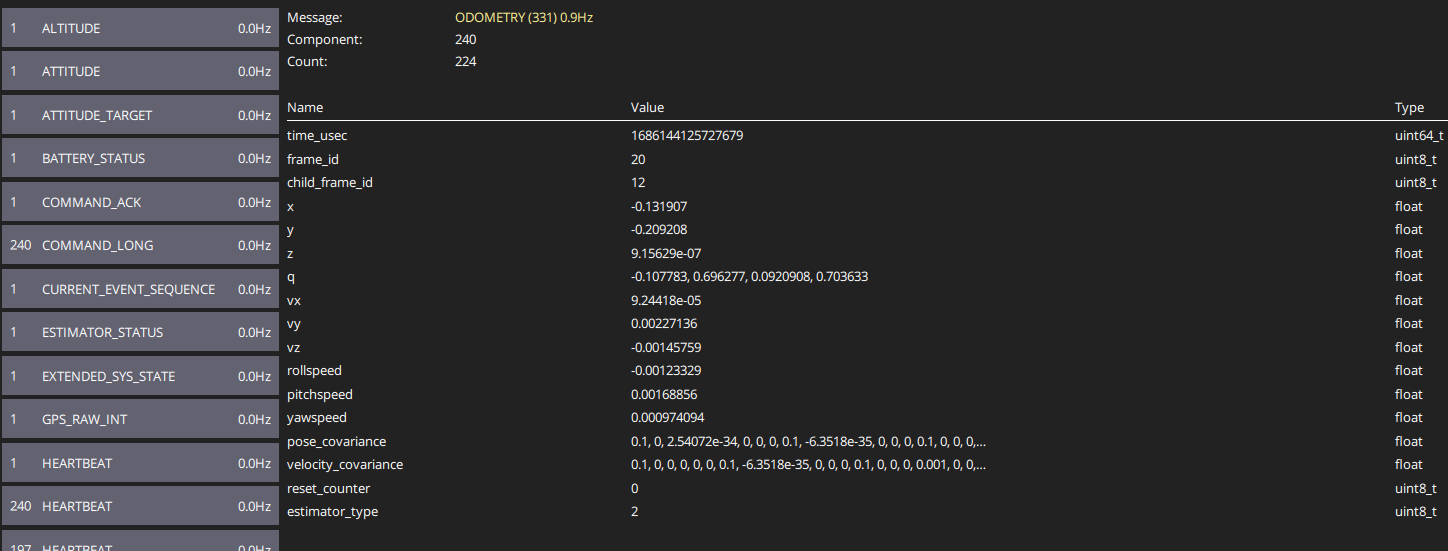
I wanted to reach out regarding an issue I’m facing with my setup using a Pixhawk 4, Jetson Nano, and T265 RealSense camera for onboard navigation Visual-Inertial Odometry (VIO). I have been following the instructions provided by PX4 on their website (Visual Inertial Odometry (VIO) | PX4 User Guide), specifically the recommendation to yaw the vehicle until the quaternion of the ODOMETRY message is very close to a unit quaternion (w=1, x=y=z=0).
However, despite rotating the drone as instructed, I have not been able to achieve quaternion values close to 0,0,0,1, especially for the ‘w’ value. The ‘w’ value only reaches up to 0.71 and then decreases. Previously, I was using the VIO package from Auterion, which is no longer available on GitHub. However, I still have the package in my own GitHub repository (GitHub - DiegoHerrera1890/VIO_T265: from auterion vio ros package). About four months ago, everything was working fine until the camera broke, and I replaced it with a new one. I also updated the firmware of the Pixhawk to the latest stable version.
I wanted to share a part of the launch file where I modify the distance and orientation of the camera:
phpCopy code
<!-- Launch static transform publishers -->
<node pkg="tf" type="static_transform_publisher" name="tf_baseLink_cameraPose"
args="0.10 0.01 -0.032 0 0 0 base_link camera_pose_frame 1000"/>
Additionally, I want to mention that the parameters EKF2_EV_POS_X, EKF2_EV_POS_Y, and EKF2_EV_POS_Z are set to their default values (0).
I would greatly appreciate your support and any advice you can provide to help resolve this issue. Thank you in advance for your assistance.