Hi there,
So I am able to do the bridge between the T265 and the Px4 just with one problem.
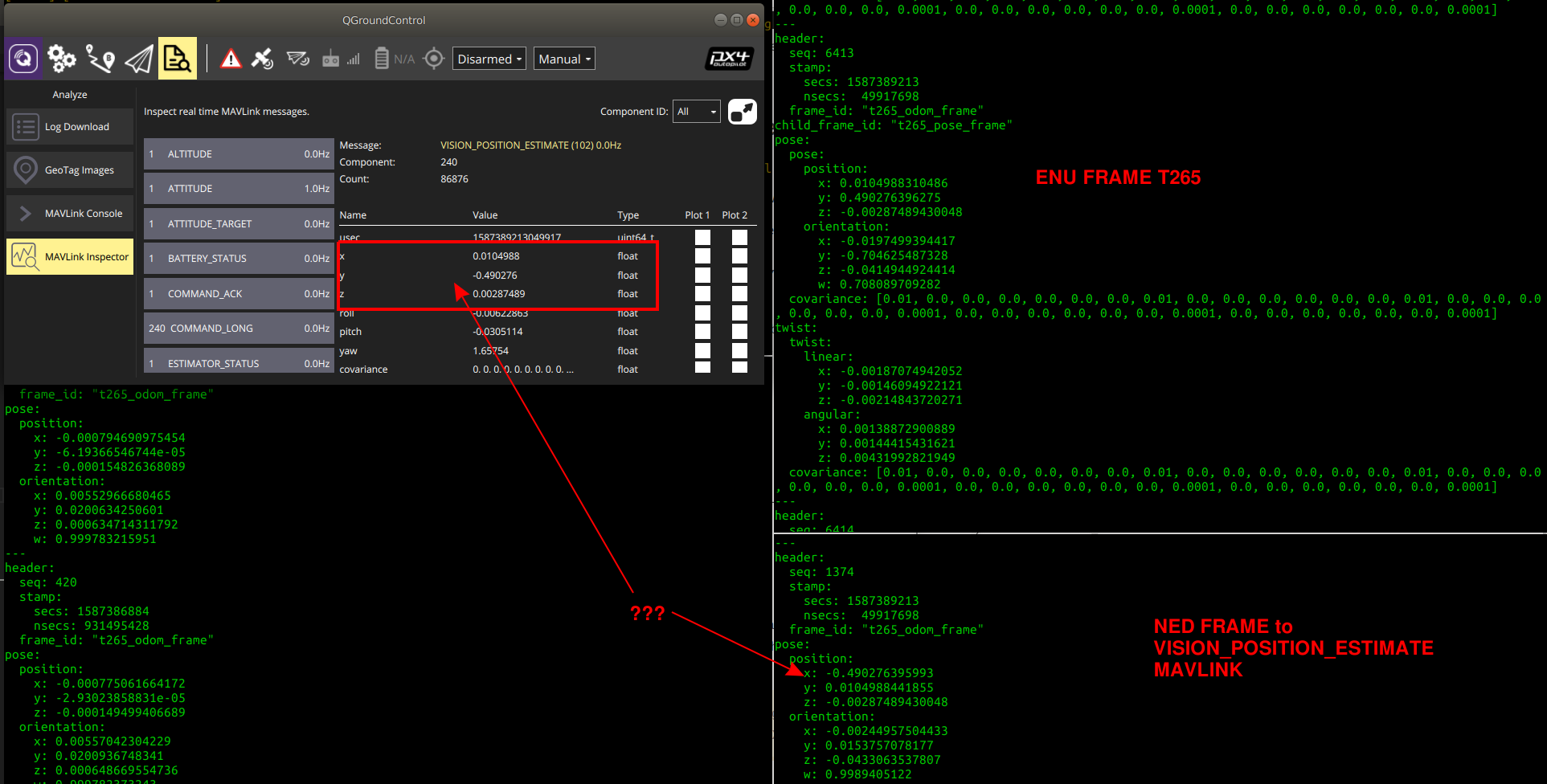
The X is being displayed under QGroundControl as Y and vice versa. In ROS rviz and the affected topics are displaying the coordinates properly.
The Z is moving properly (when up gets negative and when down positive) X and Y just seem to be sapped. Every thing else looks ok.
I am not sure if this might be an issue from PX4 firmware or QGround Control.
Hi, Because of T265 coordinate mismatch the MAVROS tf. PX4 low level believes that coordinate from MAVROS is FLU/ENU. However T265 coordinate which is published to the msg is not FLU/ENU (according to librealsense API). So that, T265 needs tf before publishing to MAVROS msg.
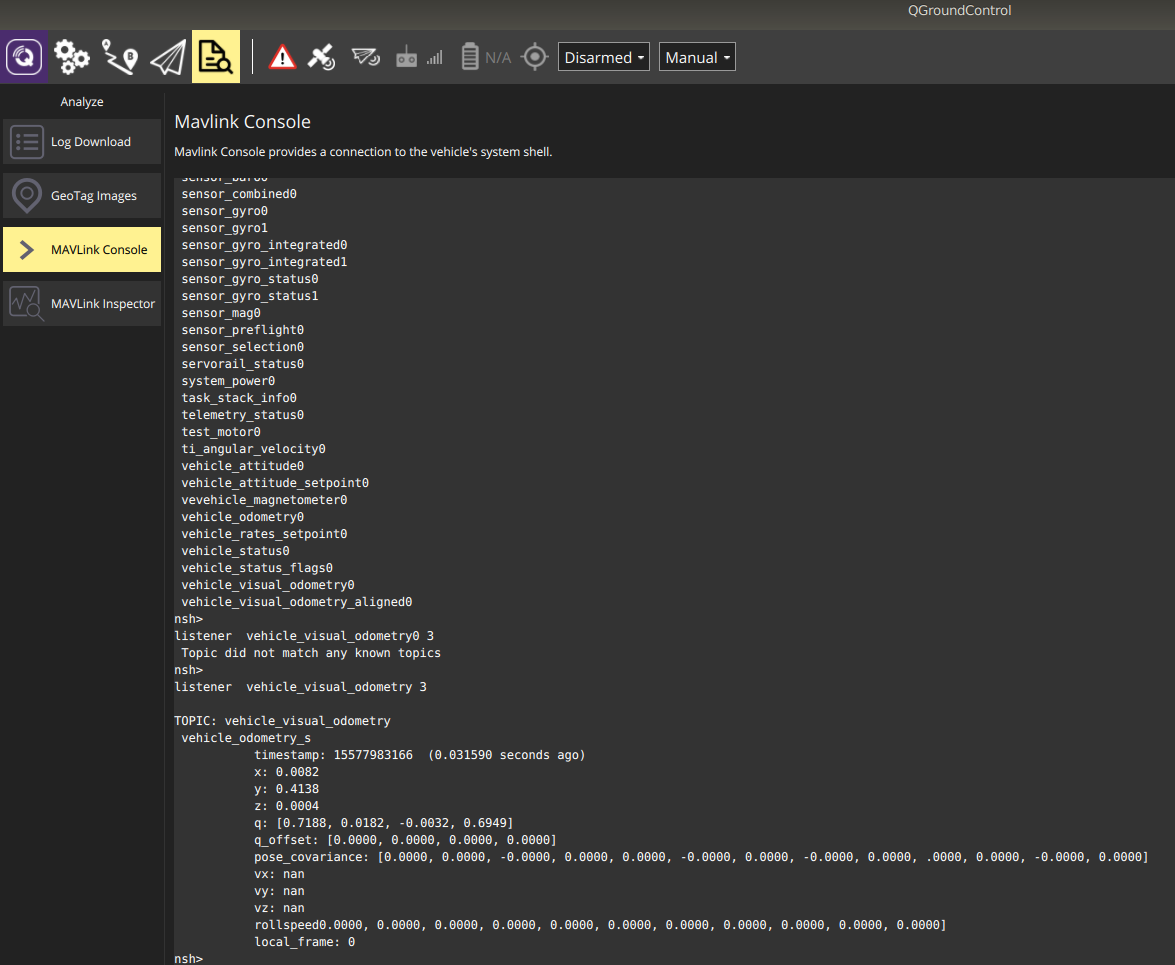
Try this, it uses /mavros/odometry/out >> mavlink-ODOMETRY >> uorb-vehicle_visual_odometry pipeline and EKF2.
Hi, thank you all. My first quick solution was to change the MavRos_extras/plugins/vision_pose_estimate.cpp and do there the required changes. But I knew that was not a permanent solution.
So since I have many depth cameras that need to be ref to frames in ROS I ended up creating a few more frames and topics for Pose. @Mzahana thanks I actually started my project based on that. By now is already very different from that. ;- )