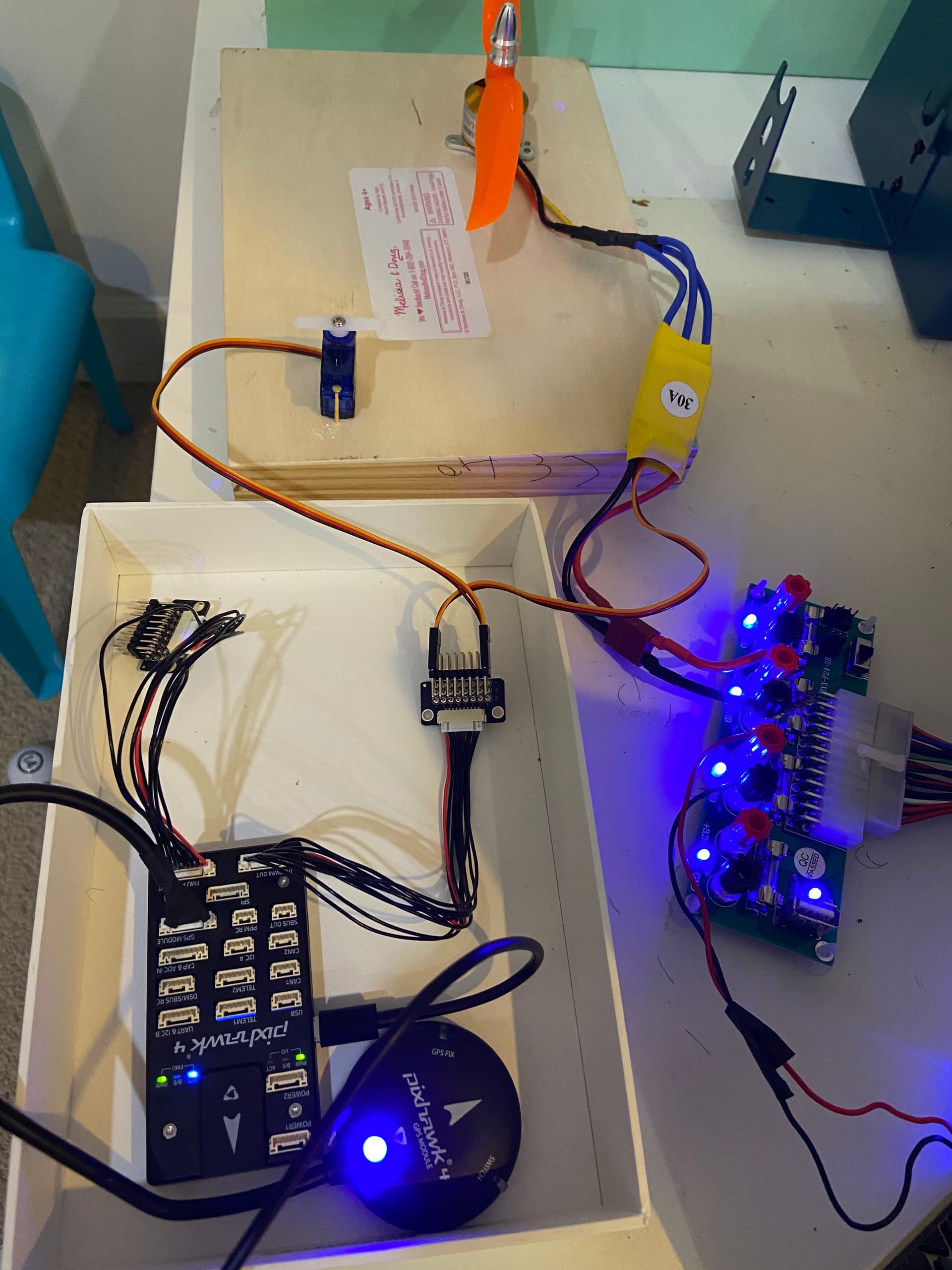
I am using an old ATX PC power supply to power the motor via a 12V output. The PixHawk is powered via USB and I have confirmed there is a common ground via a continuity test. I have independently controlled the motor via an off the shelf servo/motor controller so I know the motor is functional and I would just like to control it via the PWM I/O output of PixHawk which is connected to the ESC of the motor. Using QGROUNDCONTROL motor test or command shell to trigger PWM does not get the motor spinning. Any insights or help is appreciated.
Hi
What command code do you use?
from pwm test -c 1 -p 1200 ?
I used the motor test GUI sliders in QGroundcontrol control and the ”pwm test” command line function. I having been doing some more debugging. For this to work, the PixHawk must be armed ? I have not been successful in arming the controller due to GPS calibration errors.
In order to be able to test the engine without adjusting the sensors and GPS, you must enter the following command in the Mavlink console and change the pwm number.
pwm test -c 1 -p 1200
more information: Commands · PX4 Developer Guide
Thanks for the feedback. I was able to finally get it to work using the pwm console command outside of Qgroundcontrol.