Hello, I am doing a project and the purpose of the project is to get PWM output from the “I/O PWM OUT” section while using the PX4 as a drone. I used the drone in offboard mode and generally my commands worked correctly.
Additionally, I connected 2 motors to the IO PWM OUT port of the drone and I need PWM to run these motors.
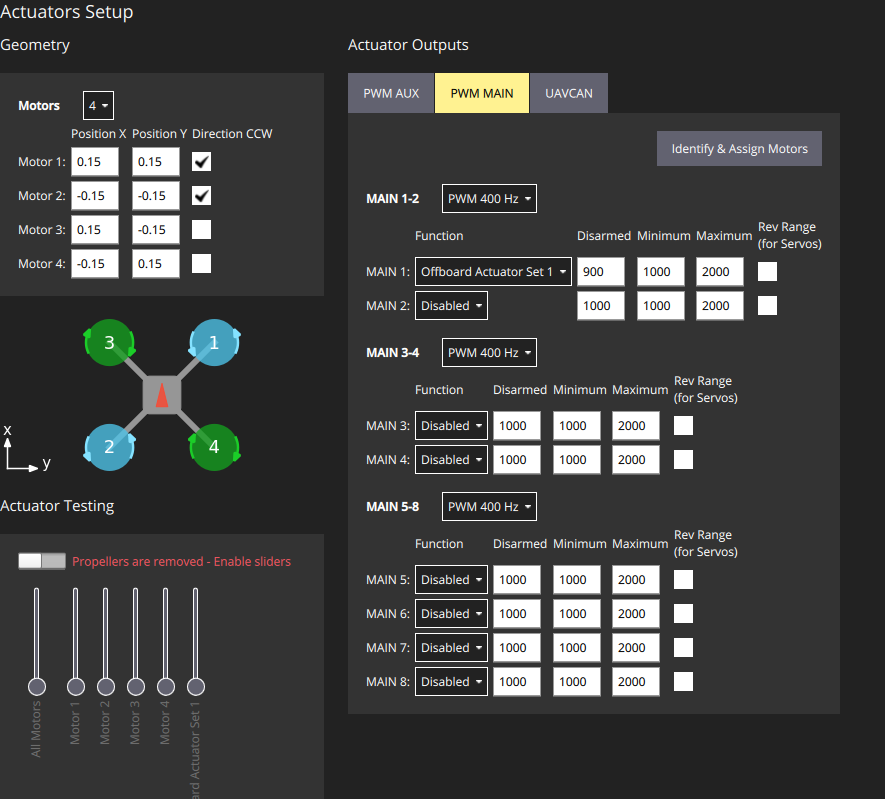
I set the MAIN 1 section on QGC to “offboard Actuator set 1”. When I test the actuator test section and examine the ANA1 section with an oscilloscope, I can get PWM output.
I run the codes below on the computer
sudo MicroXRCEAgent serial --dev /dev/ttyUSB0 -b 921600
code:
void OffboardControl::publish_vehicle_command(uint16_t command, float param1, float param2)
{
VehicleCommand msg{};
msg.command = VehicleCommand::VEHICLE_CMD_DO_SET_ACTUATOR;
msg.param1 = 1.0f;
msg.param2 = 1.0f;
msg.param3 = 1.0f;
msg.param4 = 1.0f;
msg.param5 = 1.0f;
msg.param6 = 1.0f;
msg.param7 = 0; // index
// msg.target_system = 1;
// msg.target_component = 1;
// msg.source_system = 1;
// msg.source_component = 1;
// msg.from_external = true;
msg.timestamp = this->get_clock()->now().nanoseconds() / 1000;
std::cout << "Starting offboard control node..." << std::endl;
vehicle_command_publisher_->publish(msg);
}
But there is no change in PWM waves on an oscilloscope in the MAIN 1 section.
Do I need to enable an additional parameter?
How can I make the “offboard actuator set 1” section produce PWM in the range I want via ROS2?
- ROS2 Humble
- Holybro Pixhawk 4
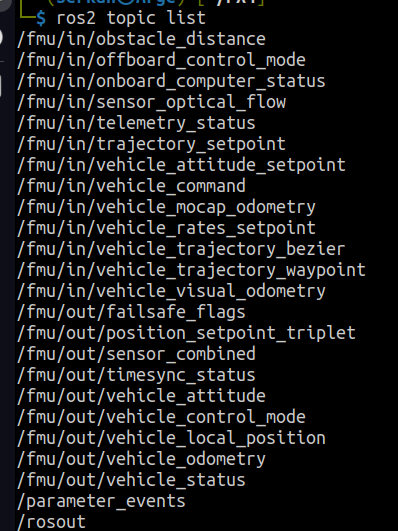
Topic output: