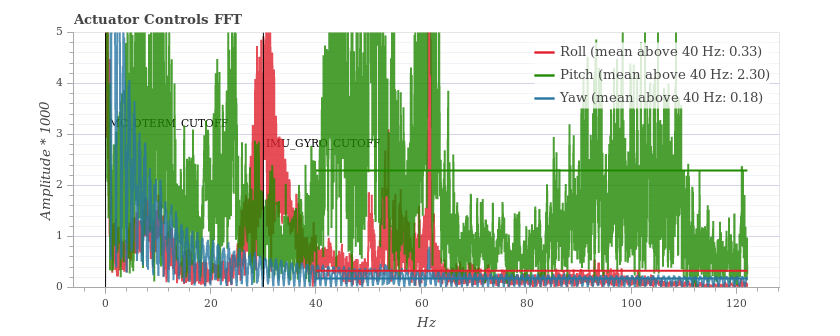
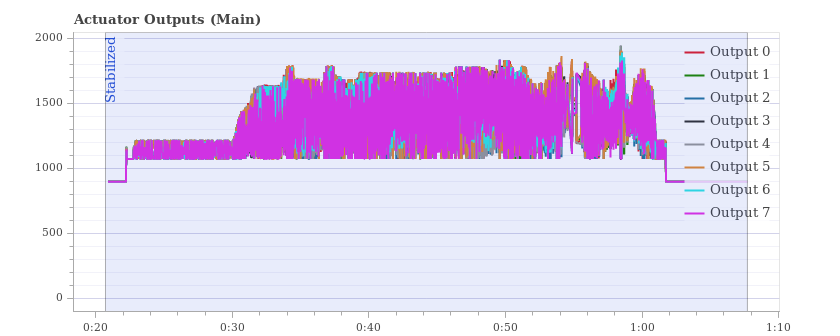
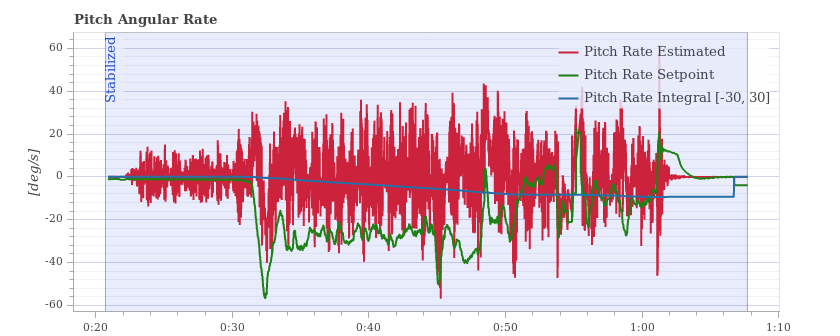
There seems to be a problem with the actuator outputs provided by the Pixhawk. The graphs clearly indicate the situation, with the actuator outputs being incredibly noisy. This reflects on the Pitch Angular Rate graph (added below as well). Please help us understand why this noise/oscillation is present, and how we can go about mitigating it. Some details about my rotorcraft have been added below -
- Currently just an aluminum frame with 8 VTOL motors mounted, using the default Octo Coax Wide airframe.
- Flight Stack - PX4
- Autopilot Controller - Pixhawk V1
- GCS - QGroundControl
Flight log (that these graphs have been taken from) - https://logs.px4.io/plot_app?log=f078f5dd-6772-43b0-a696-d2591f32a45f