Hi everyone,
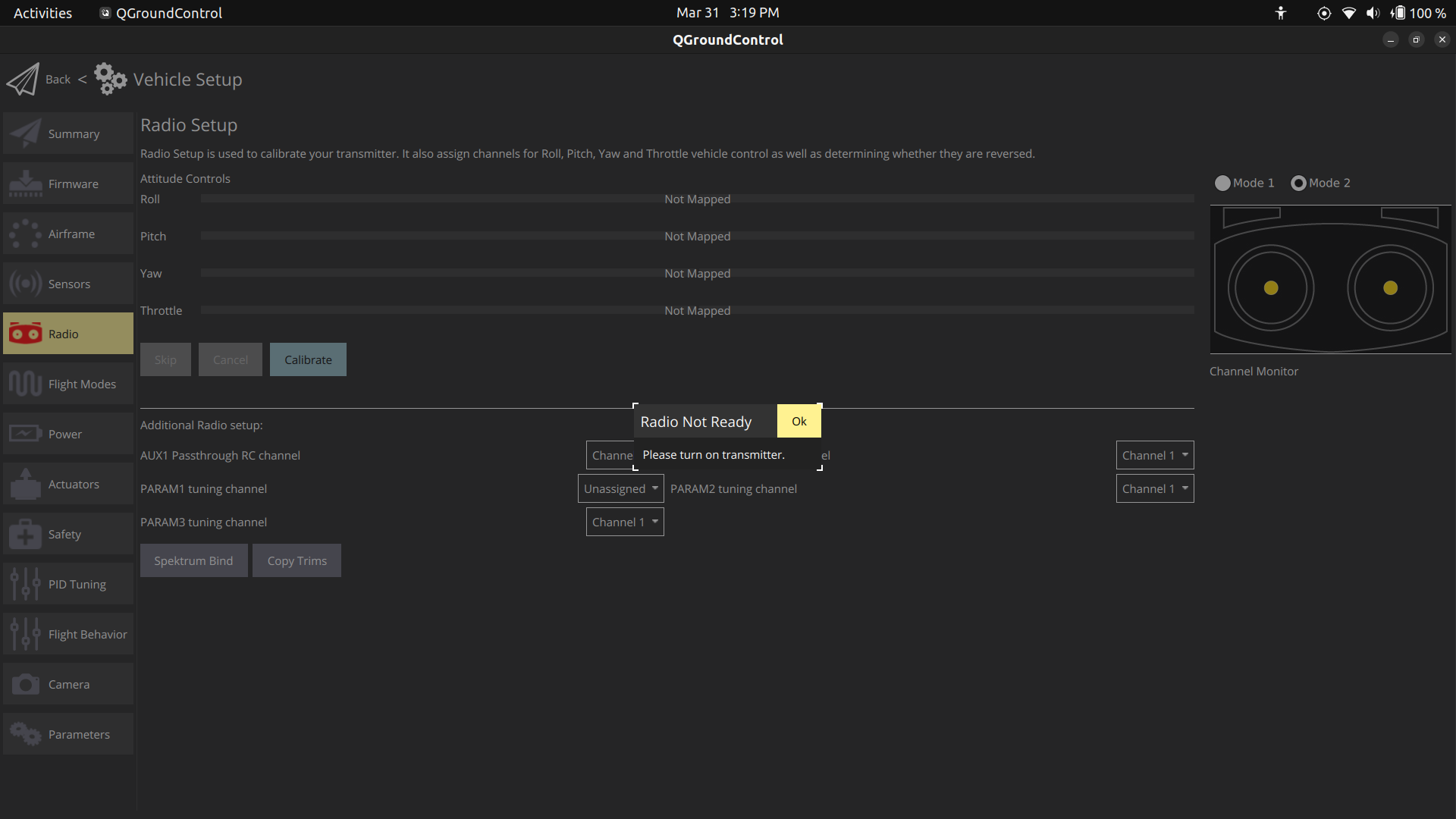
I’m having trouble getting my flight controller to detect any RC input. Specifically, my Pixhawk 6C flight controller is not recognizing signals from my FlySky FS-iA6B receiver, even though the transmitter is bound and the receiver appears to be working. In QGroundControl, no channels are detected and calibration fails with:
“Turn your transmitter ON”
 Hardware Setup
Hardware Setup
-
Flight Controller: Pixhawk 6C flight controller
-
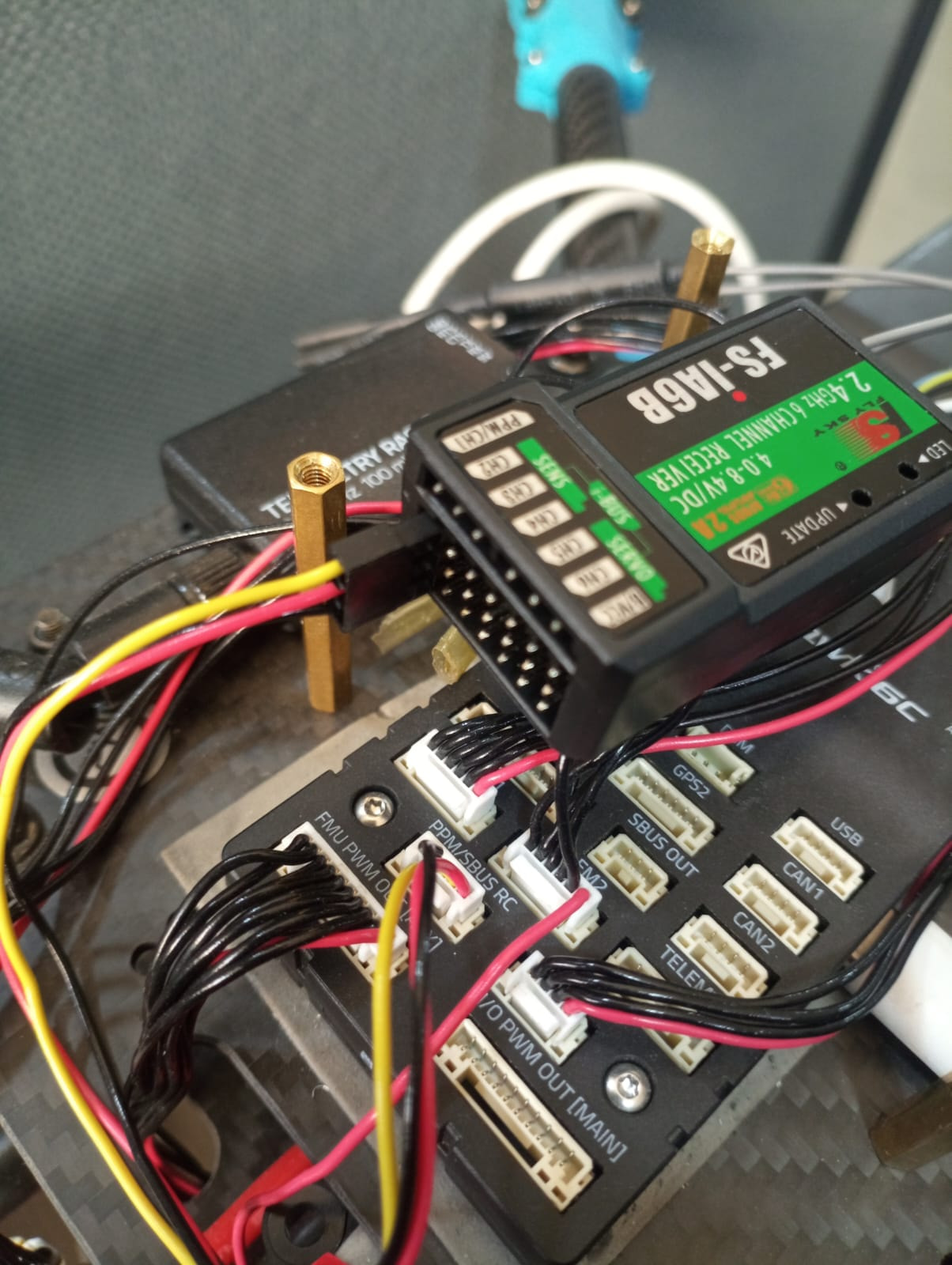
Receiver: FlySky FS-iA6B receiver
-
Transmitter: FlySky FS-i6 transmitter
-
Firmware: PX4 v1.16 (QGroundControl)
 Wiring (PPM attempt)
Wiring (PPM attempt)
I connected the receiver using the PPM/CH1 port:
-
CH1 (Signal) → RC IN Pin 2 (PPM/SBUS signal)
-
VCC → RC IN Pin 1 (5V)
-
GND → RC IN Pin 5 (GND)
 Problem Description
Problem Description
-
Transmitter is bound successfully (receiver shows solid red LED)
-
In transmitter settings:
- Output mode set to PPM
-
However, in QGroundControl:
-
No channel movement is detected
-
Radio calibration fails with:
-
“Turn your transmitter ON”
 Additional Observations
Additional Observations
-
If I disable PPM mode and connect a motor/ESC to CH2:
- The motor spins correctly → receiver is working in PWM mode
 iBUS Attempt
iBUS Attempt
I also tried using the iBUS port on the receiver:
- iBUS signal → Pixhawk RC IN signal pin
Result:
-
Still no input detected in QGroundControl
-
No channel activity
 Questions
Questions
-
Has anyone successfully used FS-iA6B with Pixhawk 6C via PPM?
-
Does Pixhawk 6C require SBUS instead of PPM/iBUS for RC input?
-
Is the RC IN port dependent on PX4IO, and could that be an issue?
-
Is there a known limitation of iBUS support in PX4 v1.16?
-
Would you recommend:
-
Switching to SBUS receiver?
-
Using UART + MAVLink instead of traditional RC?
-
 What I’m Looking For
What I’m Looking For
-
Confirmation if this setup should work in theory
-
Known issues with FS-iA6B PPM or iBUS
-
Best practice for RC input on Pixhawk 6C (PX4)
Thanks in advance — I really appreciate any insights or suggestions!