I have encountered issues connecting peripherals to the Holybro Pixhawk 4 flight controller to be used in a single motor, conventional fixed wing UAV aircraft.
-
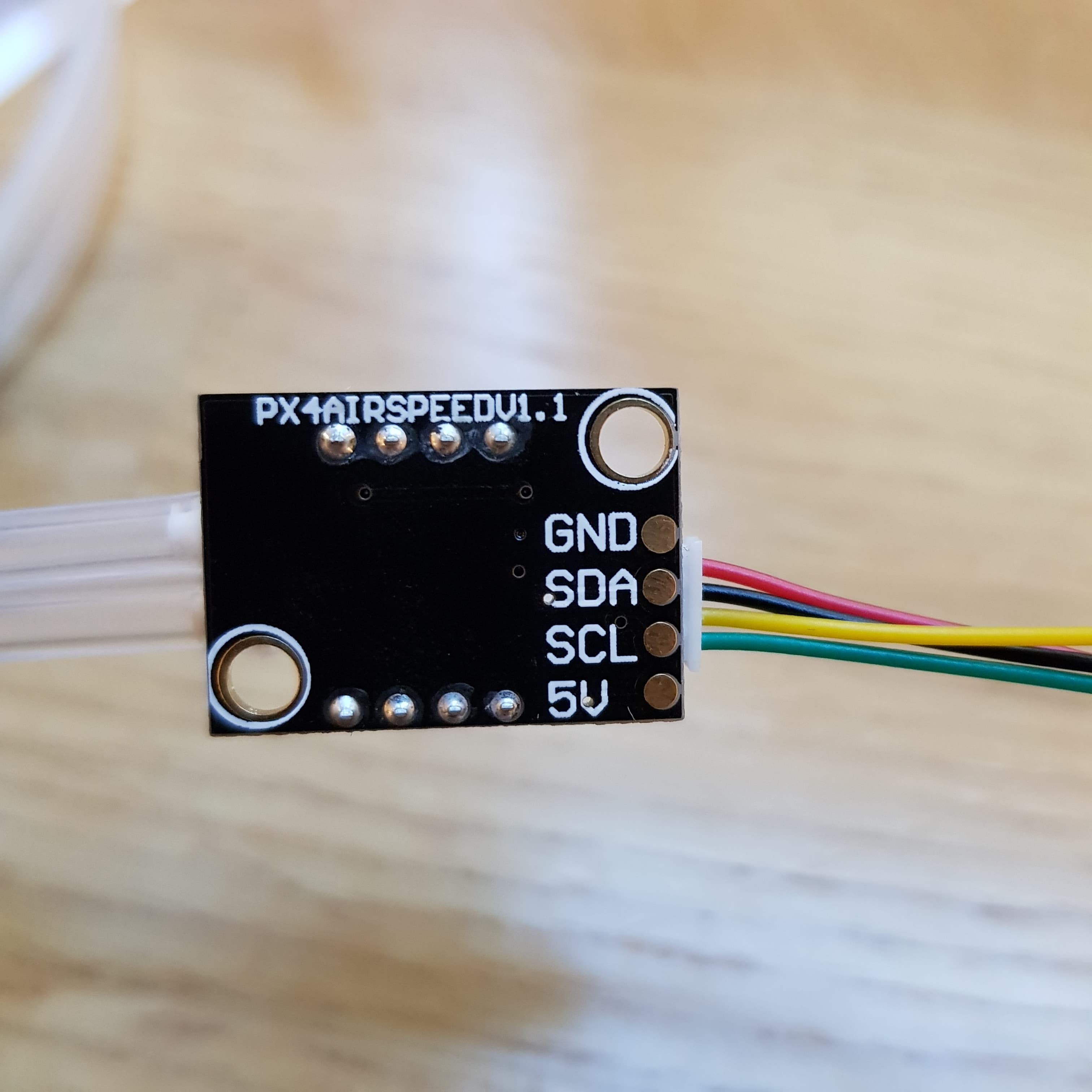
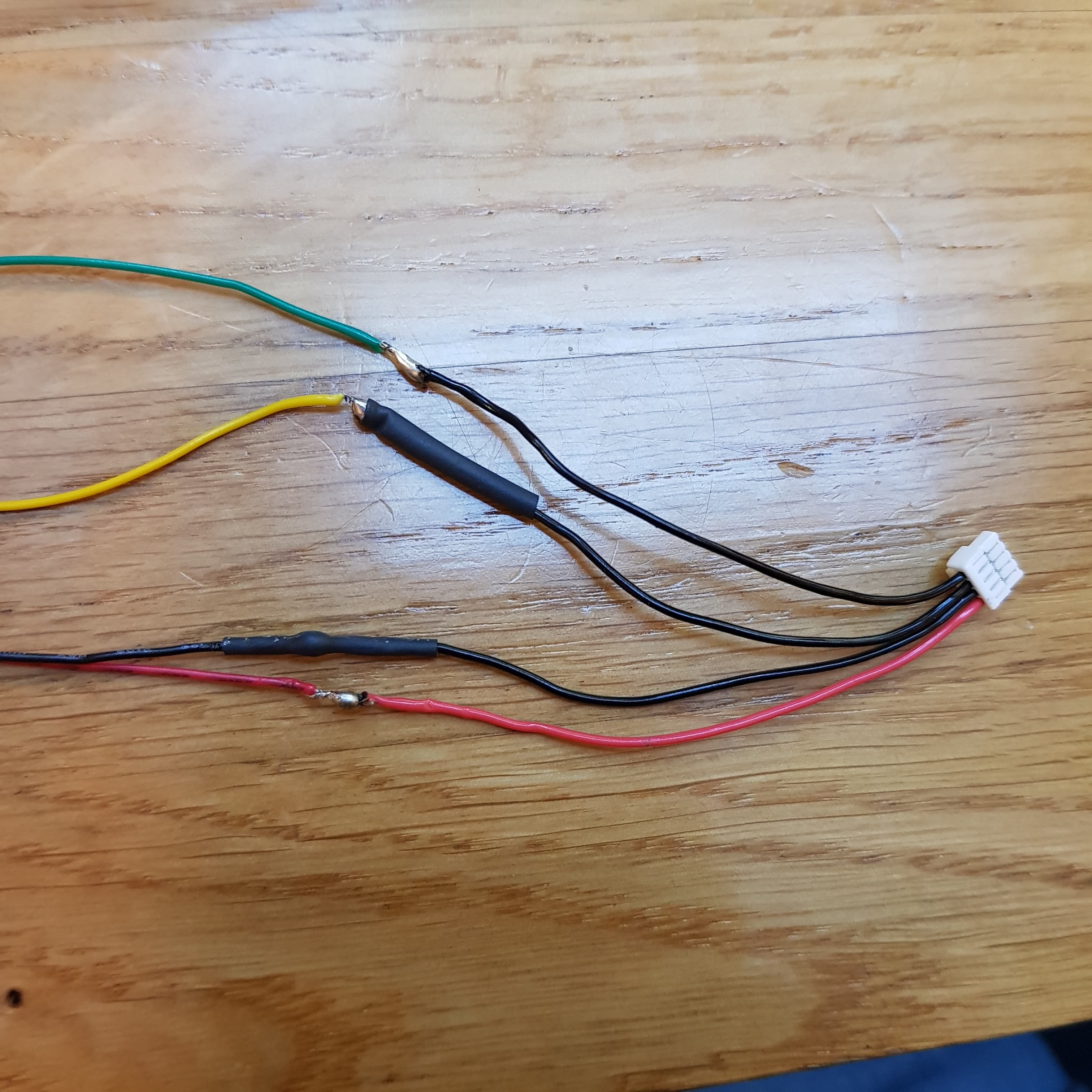
The airspeed sensor came with a JST connector, designed for the Pixhawk 1 but incompatible with the Pixhawk 4. I have attempted to solder the cables in the right order to fitting GH1.25 male connector. When I connect it to the I2C port on the Pixhawk, the sensor overheats and is not recognised by QGroundControl running on Win 10.
-
The telemetry radios I ordered can connect to the Telem1 port on the Pixhawk but cannot connect to the PC as the output is a USB OTG microB. Will a USB micro to USB C adaptor work if connected to a smartphone? Is there a way to connect it to a PC so it can interface with QGroundControl?
-
The PMW out cables do not output the signals from the RC receiver.
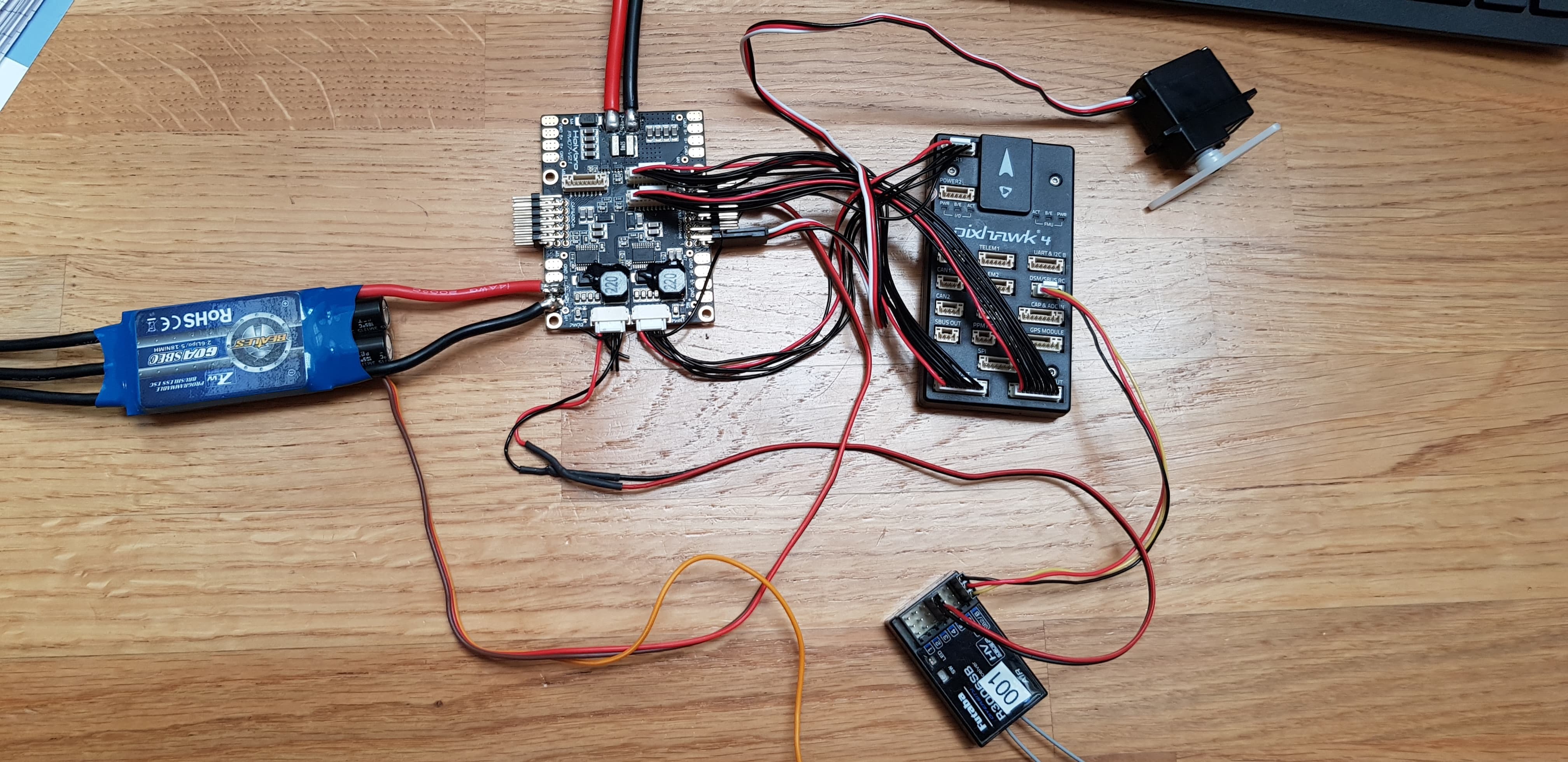
Explanation of the setup:
The SBUS port from the receiver connects to the SBUS RC port of the Pixhawk. (Confirmed by QGroundControl, moving the control sticks show up on the screen)
5 V are supplied to the receiver through the PWR 2 port on the Power Distribution Board. (Confirmed by green LED)
I/O PWM out cables from the Pixhawk connect to the I/O PWM in port on the Power Distrib. Board
FMU PWM OUT → FMU PWM IN
ESC power cables connect to B+ and GND on the Power Distrib Board.
ESC yellow wire to be soldered on the M1 next to B+ and GND, for throttle control.
BEC 5V from ESC to FMU PWM OUT rail on PowerDistribBoard. (Confirmed with multimeter)
4 Servos to be connected to the FMU PWM OUT rail. (Do not currently receive signals, only current, as holding torque noticeably increases)
I will be grateful for any help you might provide.