I have a pixhawk 4 mini FMUv5 with firmware 1.9.0 stable release and can not arm the copter. Error message is baro sensor 0 missing.
How can I find out if the baro sensor 0 works?
Good day, just check this parameter CAL_BARO_PRIME and calibrate again.
Here are some parameters of the baro sensor
CAL_BARO_PRIME 0 Primary baro ID
SENS_BARO_QNH 1013.250 hPa QNH for barometer
SYS_CAL_BARO 0 Enable auto start of barometer at the next power up
SYS_HAS_BARO Enabled Control if the vehicle has a barometer
If I disable SYS_HAS_BARO I can start the copter. But that can not be the solution.
I have already set the parameter sys_cal_baro to 1 and thus recalibrated. Unfortunately did not bring.
I am using PX4
I was able to arm the copter until yesterday
today I am getting the warning “Preflight fail : Baro Sensor #0 missing”
I have tried and checked the previous posted and have the same results.
Have you found a solution?
The problem still exists with me.
Do you have a px4 or px4 mini?
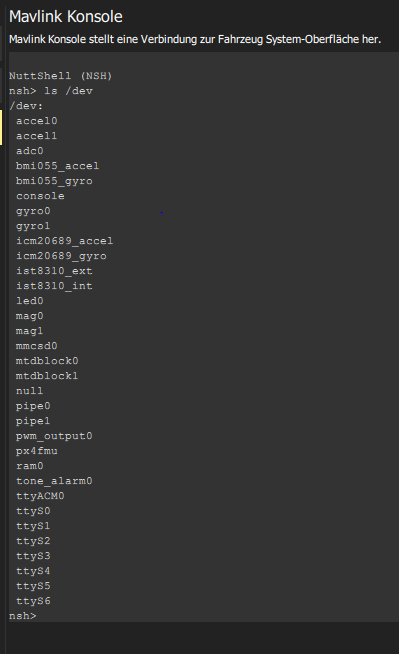
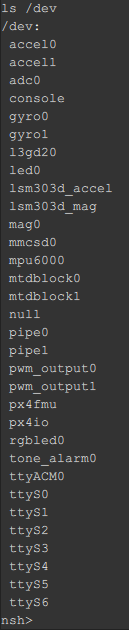
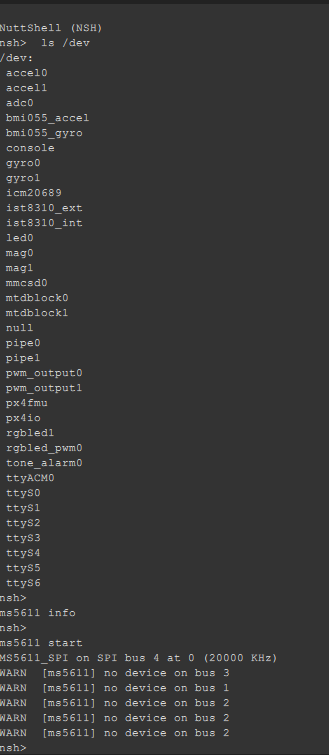
Please post your device list (ls / dev)?
When i tried “ms5611 info”
I get an empty response
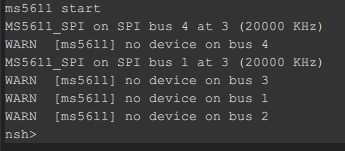
After I try “ms5611 start”
I get this
I have exactly same problem
everything was working before upgrading from 1.9.0 to 1.9.1.
On my side I did not make a change of settings except today I am grounded my drone refuses to arm.
Do you have any idea where this problem might come from and what elements would you need to do an analysis?
I use qgroundcontrol 3.5.3 and a pixhawk 4 (holybro)
thank you
same problem with me did you found any solution please help
the same problem with me did you find any solution please help me too
Hallo, may i ask if the problem is solved ? I have the same problem with pixhawk4 mini, baro sensor 0 missing.
Thank’s for an answer
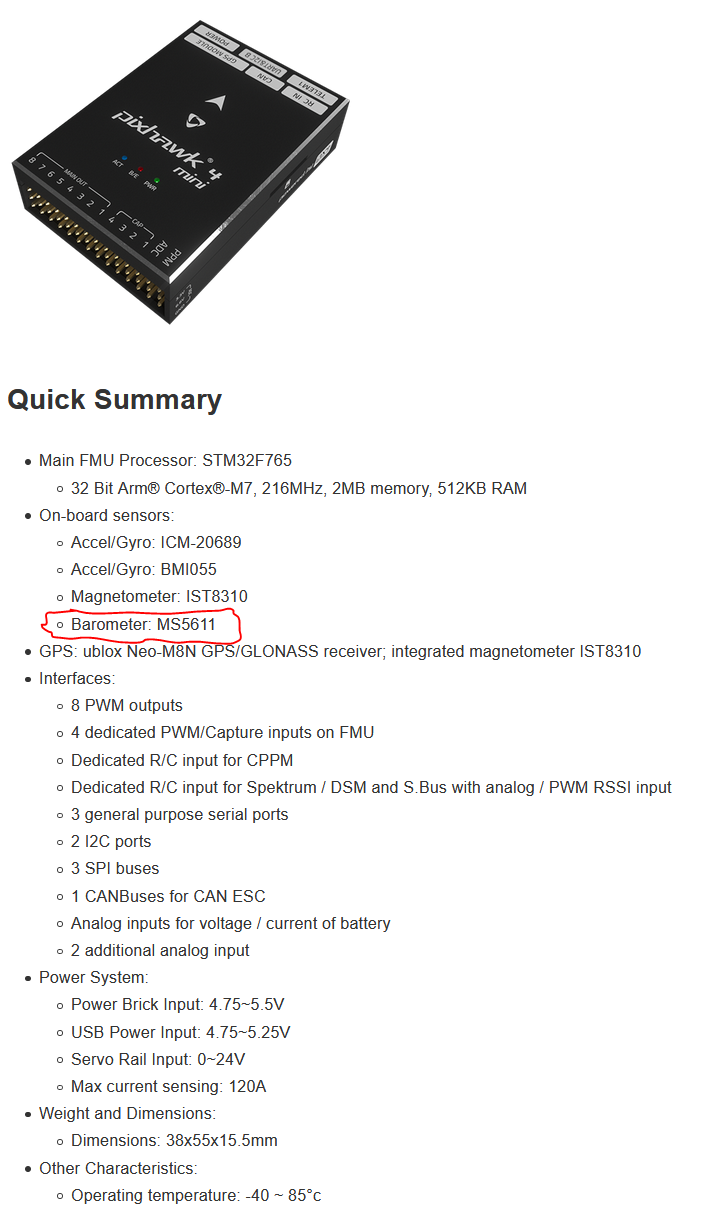
The “baro sensor 0 missing” error is probably due to a faulty/broken internal barometer. We have 3 Pixhawk 4 Mini’s at our lab, all bought through official channels, and all 3 started giving this error eventually.
You will have to add an external barometer to your UAV, which is cheaper than buying a new pixhawk. You will then need to start the baro driver by sending a command via the MAVlink console in QGroundControl, or by editing the firmware to do this automatically.
Try to buy a barometer with a default driver already written for PX4. Go to src/drivers/barometer for a list of these barometers. Note that some are more accurate than others. We used a BMP388 and it works fine.
Also note that it needs to support I2C, since you will plug it into the UART & I2C B port of the Pixhawk 4 mini. Check the pinouts document to see how to wire the baro.
If you do not want to edit the firmware, go to the MAVlink console in QGroundControl and type the command:
bmp388 -X start
Obviously use the name of your baro instead of bmp388. You will need to do this before every flight if you don’t edit the firmware.
Or, to edit the firmware to do this automatically, go to the file:
ROMFS/px4fmu_common/init.d/rc.sensors
Now add a line of code to start the barometer driver near the bottom of the file, just before the sensors app is started. e.g:
# Start external barometer on I2C bus
bmp388 -X start
###############################################################################
# End Optional drivers #
###############################################################################
sensors start
We assume the barometers fail due to a bad design of the board. Our research group decided not to buy Pixhawk 4 Mini’s anymore but rather to use other boards.
The internal magnetometers on all 3 of our boards also broke recently, which also seems to be a common Pixhawk 4 Mini problem. Solve it by disabling the internal magnetometer by setting the parameter: CAL_MAG0_EN = 0. Then you fly with only the external mag, but it should be fine. This has well worked for us thus far.
Let me know if it works. It would also be interesting to hear how many others have this problem with the Pixhawk 4 mini. Maybe they do something to fix the problem officially…?
Thank Murray_Louw,
This helps a lot. I have the same issue. I connected via usb the Pixhawk 4 Mini one moment was fine, a moment later it was not.
APM: Preflight Fail: Baro Sensor #0 missing
Being my project close to deadline, I was just going to buy another one (while waiting for Holybro feedback).
Not sure now, maybe going for the external barometer of for Pixhawk 4 (hopefully it does not have the same issue).
Many thanks,
Mario
Thank you, Murray_Louw,
i talked to my dealer and after sending logs and hardcopies, he told me, that Holybro will take back the Pixhawk Controller ( warranty) . I am now happy to have a new one, that don’t show the problem. Hope, it will be stable.
Anyway i will keep in mind your great tutorial to use a external baro sensor, if it’s needed. Hope not.
Best regards
Wolfgang
Thank you Murray_Louw and Wolfgangs,
I went for the Holybro Pixhawk 4 Mini expecting quality support in case of issues like this one.
Hopefully, my vendor will help to sort this out.
Cheers,
Mario
@Murray_Louw if you use the bmp388 start up line you are showing, will the data from the bmp388 get saved in the log file like normal? Do I have to add more lines of code?
Thanks
After the line is added to start the bmp388 driver, it should function the same as when it was working with the internal baro.
As far as I know the baro data is not logged by default, but if you are asking if PX4 can use the baro data like before, then the answer is yes.
You do not have to add any more lines of code.
Thanks for the reply @Murray_Louw
Got any ideas how to add this external baro to the ulog flile. I a cube black with a bmp388 connected. when I record some data after starting the baro with the start command I only see the two internal baro measurements.