Following on from this discussion, I think the barometer is faulty.
When I have it plugged in and powered by to USB and sitting still on my bench in my house, the readings I get out of the barometer vary by about 600mm, over any period of about 30 seconds.
Are there any drivers that need to be checked/updated? or is this barometer gone?
I have the ability to replace the SMD barometer so if it is, it’s not a big issue, I just don’twant to do it if I don’t have to obviously.
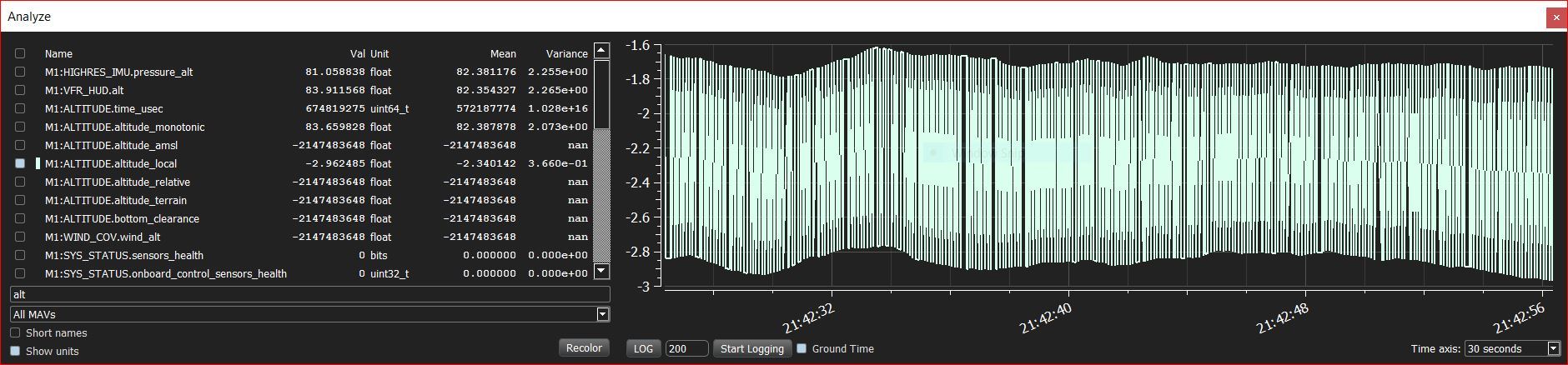
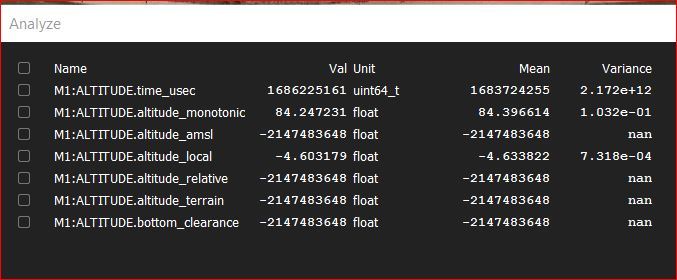
Can anybody tell me which value or values PX4-pro is using to define the altitude of the copter.
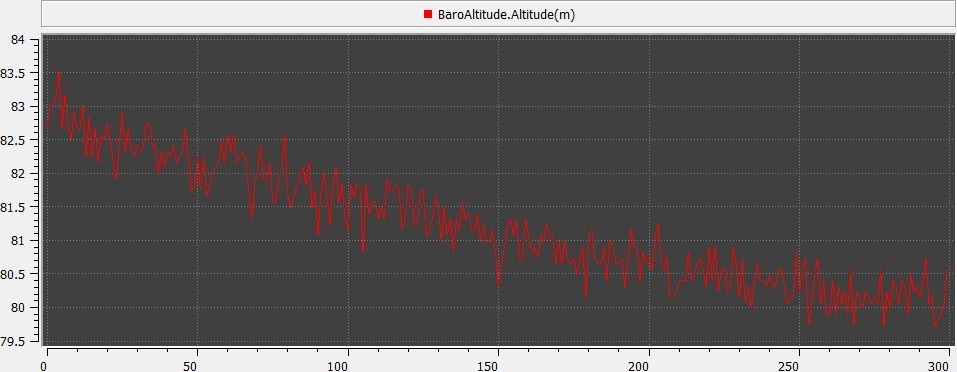
Here are 2 graphs, each showing 2 pixhawks’ barometer readings, side by side connected to the same computer. The first is over 5minutes, the second graph is over 30 seconds.
FYI: The lower and upper edges of what appears to be solid lines are actually the points from each of the baro readings, but QGC is reading them as a single line and joining them together as such.
The following graph is taken from dronin on a Sparky2.0 measuring the baro readings over 5mins
So I guess my questions are:
Over what time scale does PX4-Pro calculate altitude?
Do the readings i’m getting out of each pixhawk baro seem correct?
I suppose over 30 seconds, a range of 200mm is acceptable?
I’m still looking for some insight into how the barometer is actually used in either PX4 or Arducopter.
I find it concerning that over the space of 5 mins, the altitude slowly drops nearly 1.5m.
Is this a temperature problem?
Does the baro need a proper 5V supply instead of just USB?
Are both these barometers faulty? I find it strange that that would be true, considering these are both legitimate 3DR pixhawks and not a generic clone.
From my experience, the deviation of baro may go up to 1 or more meters.
It may relate to airspeed, temperature, oscilation and so on.
However, I have not seen a constant slow drift. In my case, the readings may go up and down slowly, but in a range.
There are some comparison test articles or videos of different barometers if you are interested.
In px4, the barometer only provides altitude to estimate absolute height in EKF2 or LPE.
If it drifts, it will affect the altitude estimation.
Thanks.
@langxm1223
Thanks for the reply. Perhaps a better test would be to attach a GPS and track the absolute height. Maybe also provide a proper 5V instead of USB.
Will create another graph and report back. Thanks.
All my tests are done on a drone on the ground, so the readings should be in a small range.
Tests with a GPS would be good for flying state performance. I guess 5V does not make much difference.
Good luck