Hello @abhinav_singh_thakur
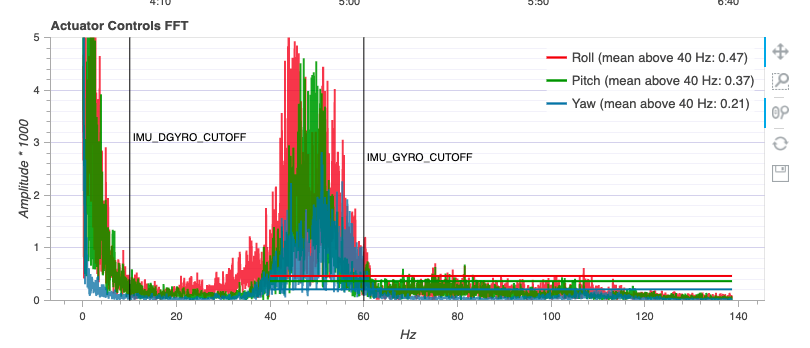
Cutoff frequency is the cutoff for a low pass filter and thus cuts off (attenuates) frequencies higher than it (with increasing effectiveness as we move farther to the right of it on the frequency axis). So, your cutoff should be below where you are seeing lots of noise ideally.
I see in the first log you posted that noise and cutoff frequency look much improved…this is good.
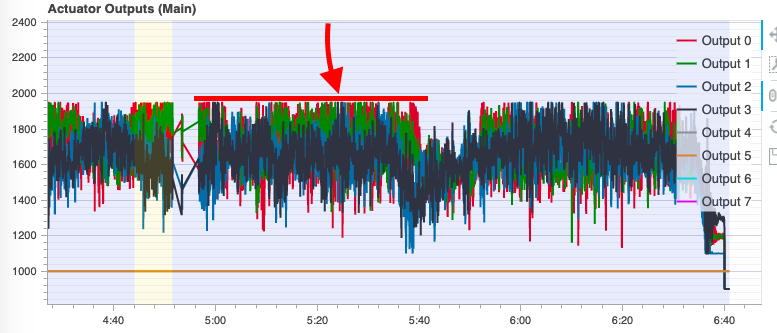
However, I am also noticing something weird with your actuator outputs and actuator controls plots, which indicate something weird is happening on the yaw axis. Are there any notes you can provide about the experience of flying with the drone for the first log?
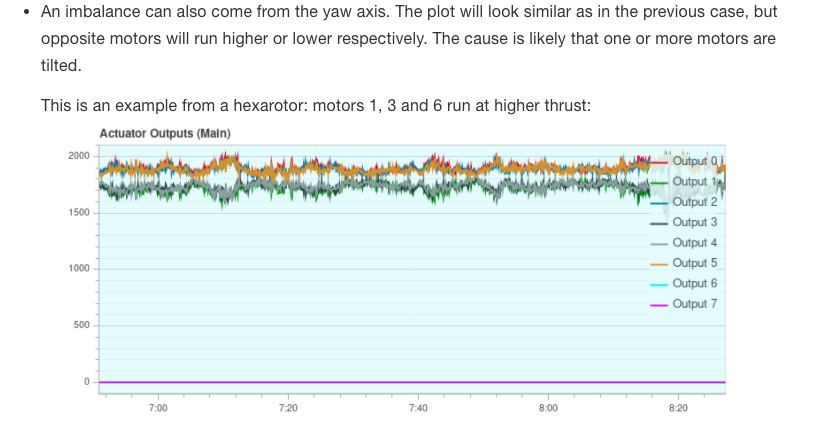
If you look at the PX4 Flight Review page, you will see this on the page:
This looks a lot like yours. Are you confident that all motors are precisely level and not angled?
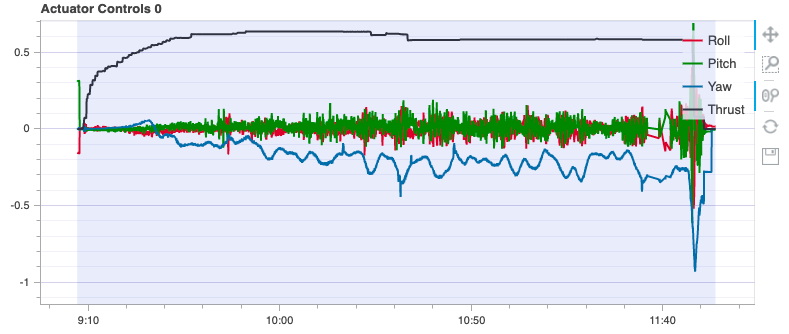
I see that on your flight, the yaw controls keep growing, due to the integral (which I think means either your yaw estimate is drifting or your controller can’t achieve good yaw tracking because it’s potentially being overpowered by motors that are not perfectly aligned).
That would be something to look into.
I should mention that I’m not an expert yet, and we are still trying to tune our drone successfully too (still not quite there yet). But I am fairly confident in the recommendations that I’ve given for you to look into.
Looking at your second log, it seems that vibration is also not horrible, but you have the same (if not worse) yaw command growing larger and larger. Hopefully you can figure out why that’s happening because I think that’s degrading your performance.
A final question: Why did you tune down MC_ROLLRATE_MAX and MC_PITCHRATE_MAX to 45 deg/s? At what point in the tuning process did you experiment with these, and why are they this low? Do you believe this to be the maximum speed your drone is physically capable of achieving in the roll and pitch axes?