Here is the answer generated by GPT4 after I uploaded the screenshots and asked it to analyze and provide feedback. The answer seems quite spot on and encouraging.
Pretty interesting how it will advance and become much more reliable.
Not sure if it can be trusted. Have any of you tried this? Have you come across any good prompts for the similar purposes uses. What are your thoughts?
GPT answer:
I have examined the provided flight log screenshots. Here are the findings and recommendations:
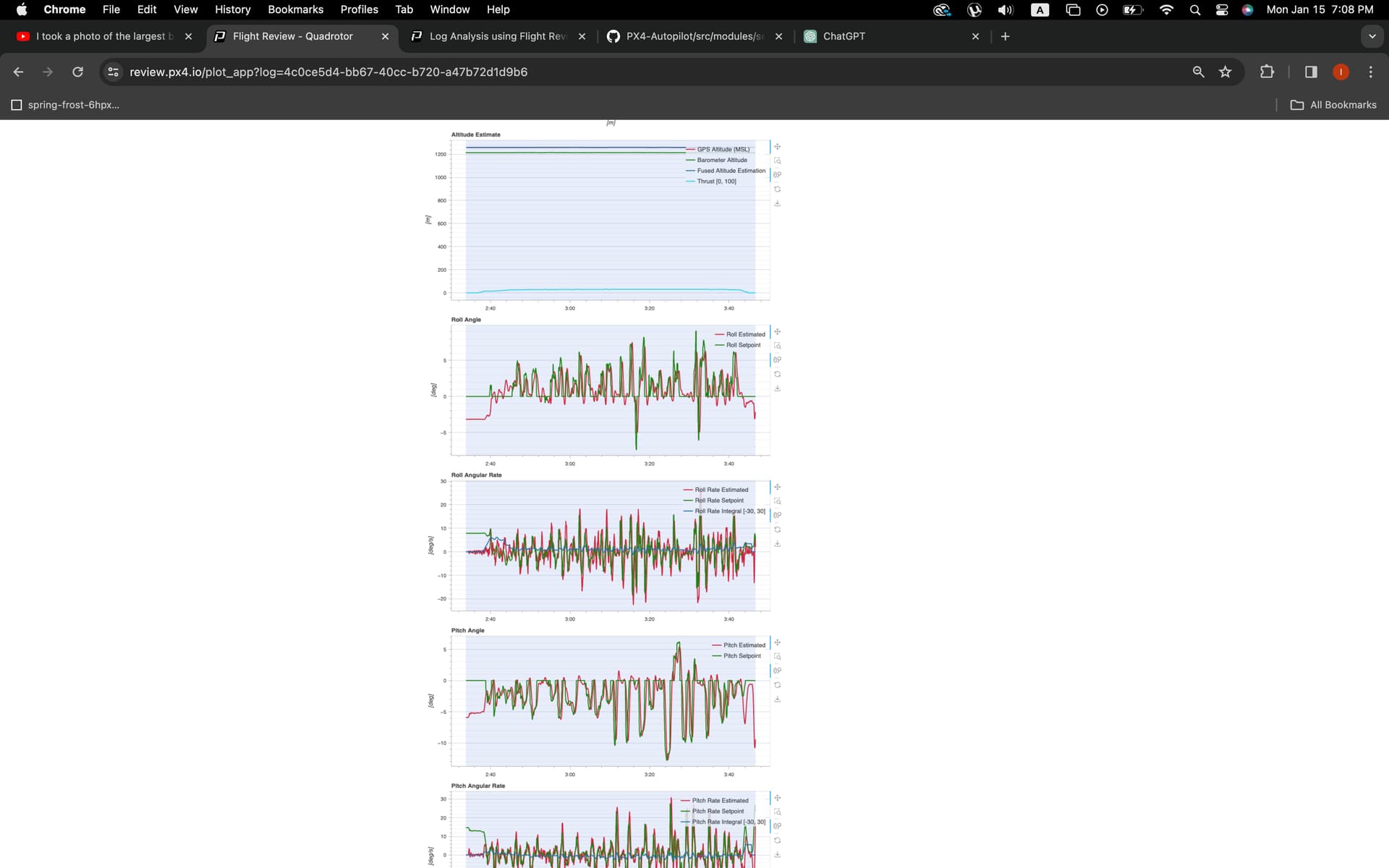
- Pitch and Roll Rate: The graphs show significant oscillations in the pitch and roll rate. These oscillations suggest that the drone might be overreacting to control inputs or disturbances, which could be indicative of gains that are set too high in the PID controller.Recommendation: Lower the PID gains, specifically the P (proportional) and D (derivative) gains, for pitch and roll. This should reduce the oscillatory behavior.
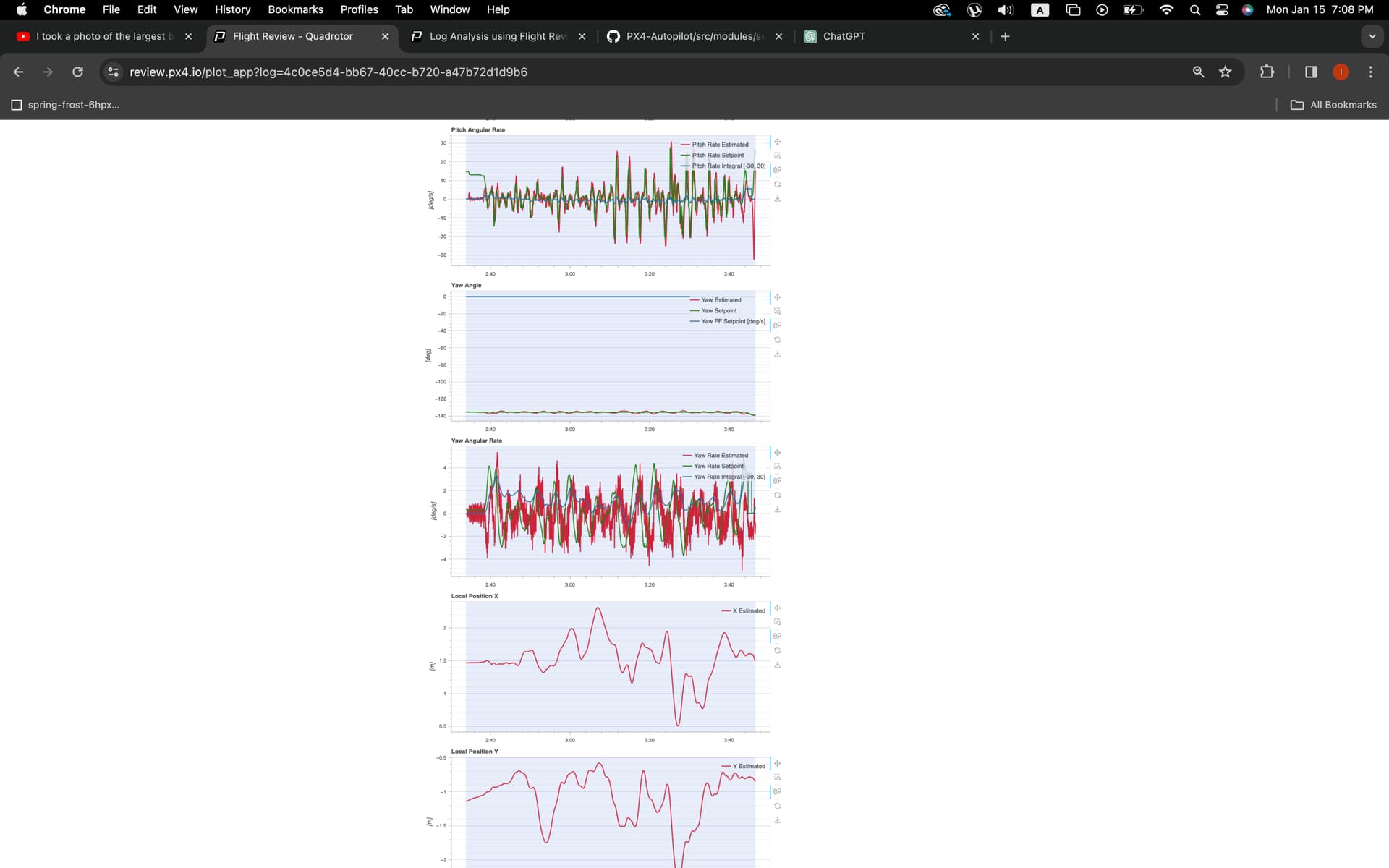
- Yaw Rate: The yaw rate appears relatively stable compared to pitch and roll, with fewer oscillations. This indicates that the PID tuning for yaw might be more appropriate for the drone’s dynamics.Recommendation: If there are any minor oscillations or if the yaw response is sluggish, consider slight adjustments to the yaw PID gains, but it seems to be less of an issue.
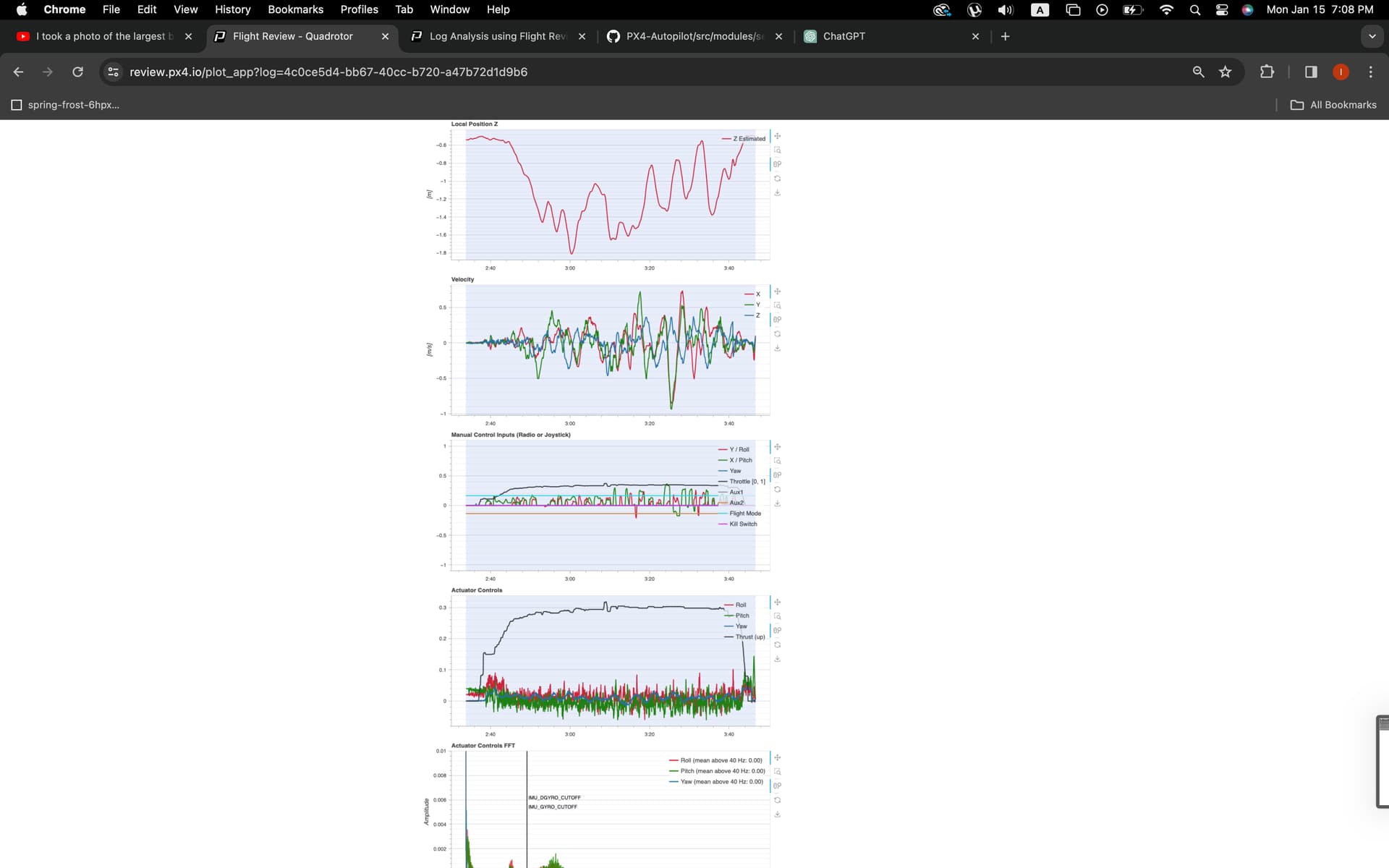
- Local Position (Z Estimate): There is a regular pattern of fluctuation in the local position Z estimate, which could indicate an issue with altitude hold or barometric pressure variations.Recommendation: Check for any environmental factors that could be affecting the altitude reading, such as propeller downwash affecting the barometer. You may also need to calibrate the barometer or use an external barometer if the issue persists.
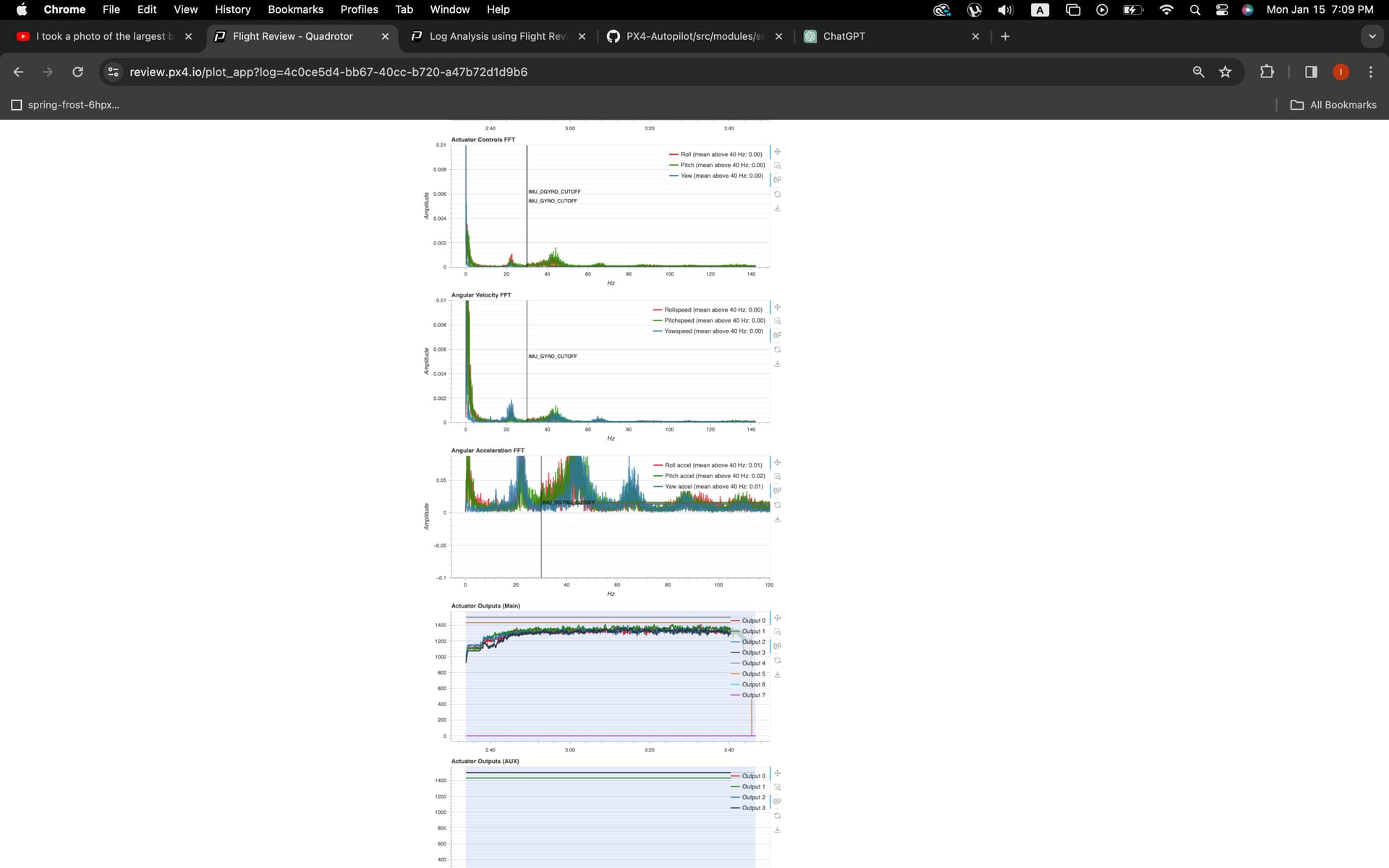
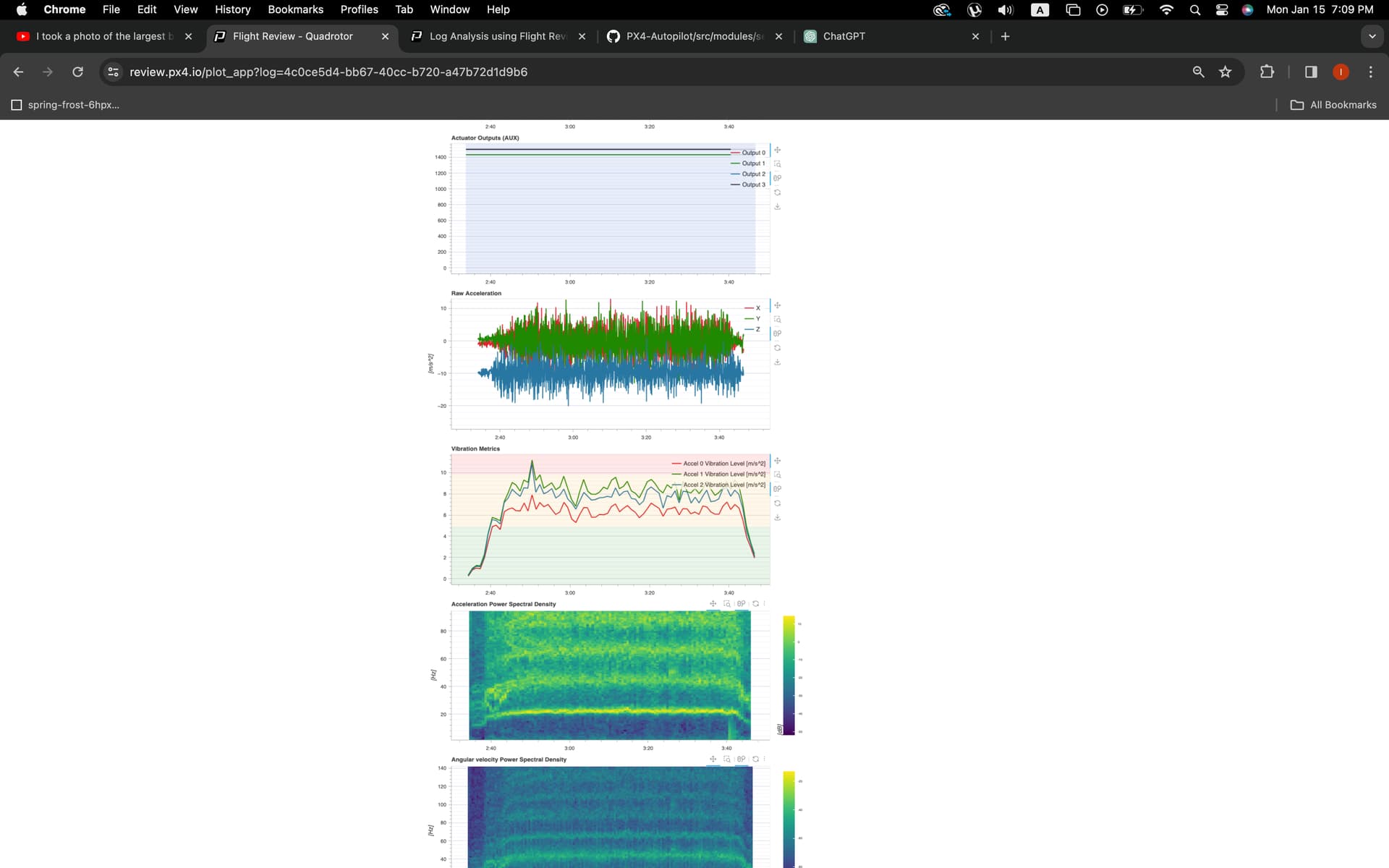
- Vibration Levels: There is noticeable vibration in the graphs, which could affect the inertial measurement unit (IMU) readings and, consequently, the flight performance.Recommendation: Ensure that all propellers are balanced and that the motors are securely mounted. Additionally, you might want to add vibration dampening to the IMU mount.
- Actuator Outputs: The actuator outputs are showing variability which could be due to the drone trying to stabilize itself against the oscillations seen in pitch and roll.Recommendation: After adjusting the PID gains, monitor the actuator outputs again to ensure smoother operation.
- GPS Noise: There is some level of GPS noise visible. While this doesn’t seem
to be excessive, it’s worth noting as it could contribute to position hold errors if it becomes worse.
Recommendation: Ensure the GPS module is securely mounted and has a clear view of the sky. Avoid sources of electromagnetic interference.
- Manual Control Inputs: There are some instances where manual control inputs are erratic, which could be the pilot’s response to the drone’s behavior or could be contributing to it.Recommendation: Practice smooth control inputs and consider using expo settings on the transmitter to make the controls less sensitive around the center if the drone is too responsive to pilot inputs.
- Thrust: There is consistent thrust being applied, but any variations here could be in response to the oscillations seen in the pitch and roll.Recommendation: After tuning the PID gains, ensure that the drone hovers at a stable thrust level without significant variation.
These observations are based on the data visible in the screenshots. For a more in-depth analysis, examining the full flight logs with software that can analyze the data across all channels would be ideal
. Ensure to perform these adjustments incrementally and conduct test flights in a controlled environment to evaluate the impact of each change. Keep in mind the heavy lift capacity and the large propellers, which mean that inertia and momentum will have significant effects on flight dynamics. It’s important to adjust and test each parameter carefully to avoid overcorrection, which can lead to instability or oscillations.