Hi all,
We have a DJI 330 Frame, with e-flite 370 1200kv motors, 8x4.5 props, 20amp esc’s, 2200 3s lipo, and holybro pixhawk 4, running the 1.10v of px4.
We have added an extension to the frame, to mount the companion computer and the PDB (as you can in the picture). Total weight is 950 [gr].
For testing, we connected the quad to a steel frame with elastic bands to stop it from flipping and crashing.
Until we reach hover thrust everything looks fine, but when increasing the throttle slightly more, the drone starts to shake badly. When reaching 75% throttle, the shaking stops and it looks normal again.
At first, we tried testing without the bands and the steel frame, and the drone flipped at the hover thrust, and we broke 2 props.
Attached logged data from the flight controller:
Logged Data
Video from the test:
Testing video
We are not sure if the vibrations are caused by a structure issue or a wrong PID or filters configurations.
Your thoughts are appreciated.
Thanks in advance,
Iftach.
In the spectral density chart you can see each of the 4 propellers speeds very clearly so balancing them would help. You’re flight controller looks elevated from the frame which amplifies the vibrations.
As far as parameters you’re p rate and d rate gains are probably too high but for smaller multicopters that are capable of rotating quickly the delay generated by the default low pass filter values.
You have harmonic coupling issues with that test stand so what I do to start is to tie a string around my drone, give it a little throttle, and pick it up. It would probably be safer to put the string over a pulley so your hand isn’t above the drone. Start with low gains and bring them up until the vehicle seems flyable. Once you actually fly it the PID analyzer is pretty good at telling you what to do.
Hi ericleal,
As you suggested, we lower the P and D rate values, and It solved the vibrations problem completely.
We are now able to fly it without any issues.
Attach is the logged data from the last flight:
Logged data from flight
We will appreciate if you can take a look and see if there is anything else we can adjust to improve the performance.
Thanks alot,
Iftach.
The level of vibration you are seeing is still high at the motor rotational frequency. You can find a lot of videos online about propeller balancing which would help. The p angle gains look too low which can cause integrator windup and problems with the velocity mode controller.
Hello again,
Thanks for the help. We will to balance the propellers and increase the p angle gains.
Hi @iftahnaf , have you figured out this problem? We are also using f330 and also experiencing this kind of vibration. IMG 1236 - YouTube
Any suggestions are welcome! THanks
Hi,
I running my F330 with Holybro’s Pixhawk 4, with px4 v1.10.
I had problems with my PID values and the fact that my flight controller was mounted with extra vibration damper.
After removing the extra vibration damper and tuning my PID’s the vibrations stops.
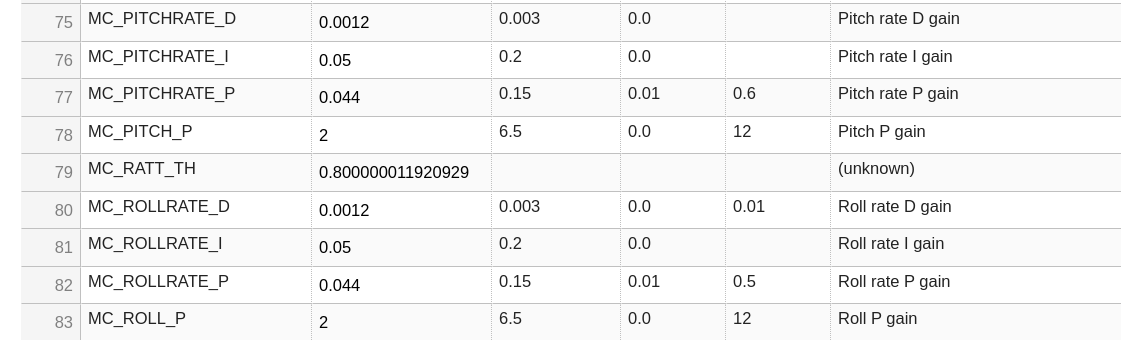
Here are my PID values:
Let me know if it helps some how.
Iftach.
@iftahnaf
Thank you very much! I am going to tune PID. Just want to confirm that you are talking about roll/pitch rate control pid, right? (Did you tune roll/pitch control pid?)
Also, how do you tune the value? I am thinking to reduce the default value of P and D and see the performance.
For damper, so after removing the damping, your fc does not have any damper? Because I didn’t use any damper, so not sure whether this will cause problem.
I really appreciate your thoughts and it would be really helpful!
Hi @zhefanxu ,
I tuned both the rate and angle controllers, I recommend to check the px4 documentation about tuning.
In my last comment you can see my gains values.
The Holybro Pixhawk 4 has internal dampers on its IMU so no need to add external dampers on the flight controller mount board.
Let me know if I can help in any other way,
Iftach.
Hi @iftahnaf
We have tried to tune the PID value. Decreasing the P and D helps reduce the visible vibration, but also becomes hard to control.
I saw you choose airframe as “F330 w/ DJI ESC”. I am not quite sure whether we should use this setting because we do not use DJI ESC. So, do you actually use DJI ESC?
Hi again @zhefanxu,
I’m not using the DJI ESCs, but it sounds like your problem is the PIDs tuning.
You should read the documentation about tuning the PIDs values.
I’m far from an expert level at this, but here is what I did:
- If the drone vibrates, reduce P, I and D values in both pitch and roll.
- After each change, hover for few seconds and then check the ulog file, especially check the set-point vs estimated value in the roll rate and pitch rate, it should be pretty close without big overshoots.
- Check the FFT signal from the IMU, reduce the gyro filter to value below the natural frequency ( around 40 HZ). you will need to enable fast logging profile for that data.
- If the drone became hard to control because the low PIDs value you can try to increase P carefully, always check the ulog files.
Hope it helps,
Iftach.