Hi,
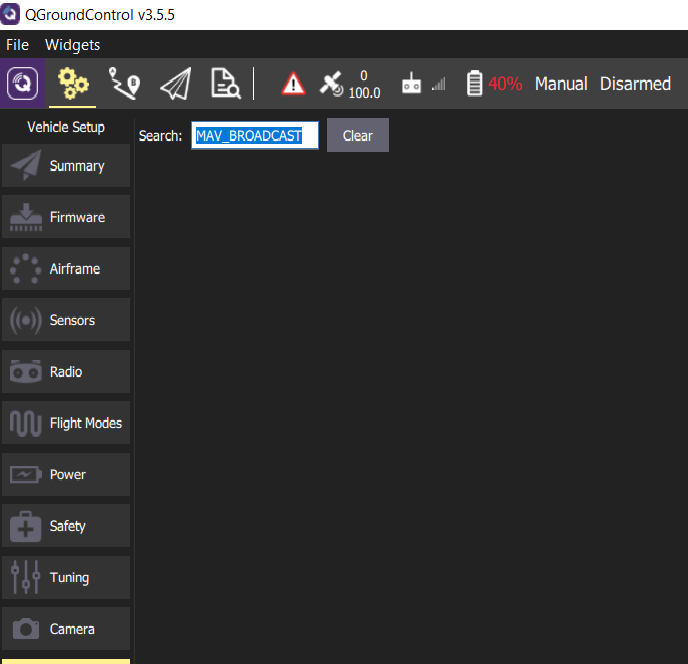
I am trying to use PX4 board to control a gimbal through Telemetry 2 port, by mapping one of my RC channel to AUX1. The gimbal (Gremsy) instruction indicates that on PX4, we need to set the MAV_BROADCAST to let the PX4 send heartbeat to Gimbal. However, I can not find this parameter, can anyone tell me what needs to be done before I can configure this?