Hello,
I have seven drones that we intend to fly outdoors. However, I have encountered issues with drifting despite adjusting the parameters for outdoor conditions. The drones are unable to switch to position mode and only operate in altitude mode.
We are facing several problems:
- The magnetometer (Mag) is not valid. (No valid data from Compass 0compass-0)
- When using VIO (Visual Inertial Odometry), we lose the VIO during yaw movements, and it cannot be reset.
- If we rely solely on outdoor parameters, the drones cannot fly because they do not switch to position mode.
- The drones vibrate; we have tuned the PID (Proportional Integral Derivative) settings, but the issue persists.
Please assist us in resolving these issues. I am uncertain why all seven drones are unable to operate effectively outdoors.
Drone Model: RB5
Hardware Version: M0052
VOXL-Suite Version: 1.1.2
PX4 Version: 1.14.0dev
Thank you!
@Amin_Bassiri
First of all, you would need to post a flight log in order to get sufficient support.
Second, from what it sounds like, the seven drones you have are not air worthy (they don’t fly in position mode with GPS). I suggest you flush out all issues so that the vehicles fly reliably with GPS before attempting to fly with VIO.
If your magenetometer is not valid, you will not be able to fly in position mode.
Thanks for your reply, but how can I validate my magnetometer? how can I fix this problem?
I calibrated but it still has the same problem.
here is the log file:
https://review.px4.io/plot_app?log=c211415b-7b67-44e6-bf0b-ec5f963f5c85
@Amin_Bassiri There are multiple levels that you need to check
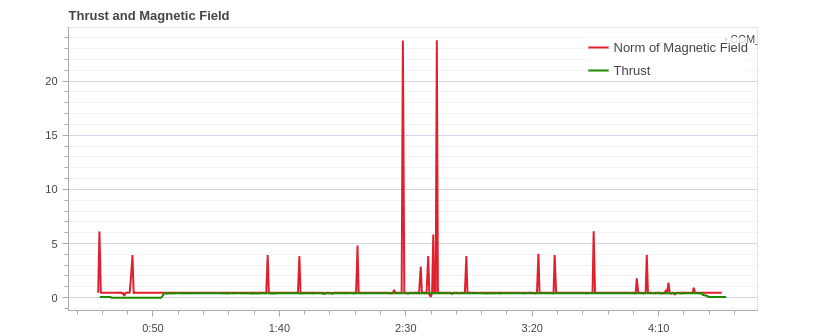
a. You would need to check whether the driver starts and that the hardware works. (From the flight logs there seems to be data, but seems to be quite some interference)
b. If the driver works and there is data from the magnetometer, you would need to check why the calibration doesn’t work. You can look into whether manually specifying the magnetometer or autopilot orientation helps.
I noticed that you are using modal AI RB5. You probably additionally need to check whether the px4 version you are using is supported by the vehicle or directly contact the manufacturer.