we are doing a benchtest for a VTOL here (airframe is like babyshark): Flight Review
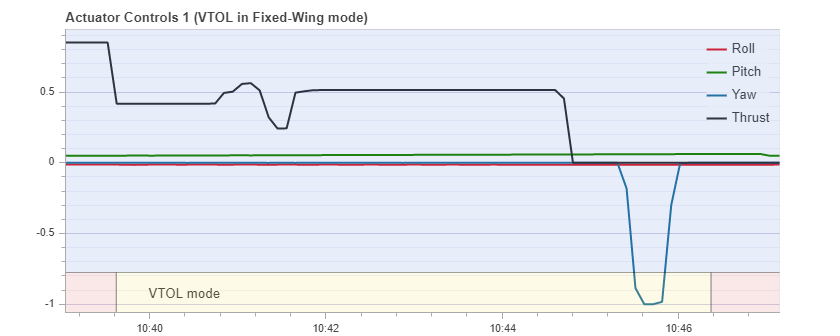
The transition looks good, but after the transition the pwm output for the pusher motor is between 900-1000 but not 900-2000 anymore. Is there any explanation for this? Is there some parameter that we overlooked?
During fixedwing. The actuator_controls look correct, but it behaves as if another mixer is suddenly being used. I had a look in the log file and shortly after finishing the transition there was a land detect. Is it possible that a land detect causes the pwm range to be 900-1000 instead of 900-2000?
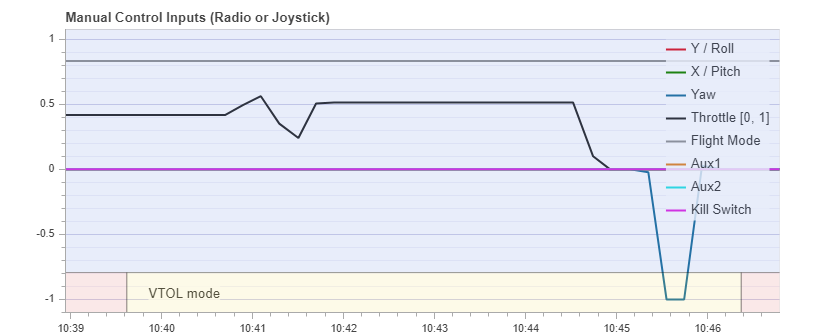
If I’m reading the plots correctly, you were in Stabilize mode, throttle on the Tx was 50% pretty much most of the time in FW. Did you try to push the throttle to full? Did you calibrate the pusher motor separately and individually directly on the Rx?
Here all main motors max pwm values get set to their respective disarm pwm values. In our case PWM_MAIN_DIS3 is 1000. That’s the reason why the actuator_output for fw thrust is being mixed between 900 and 1000. Is it possible that the MAIN 3 output is being disarmed, even though it does not appear in VT_FW_MOT_OFFID?
setting the old VT_MOT_COUNT to 4 and restructuring the mixer file etc/mixers/babyshark.main.mix (https://gist.github.com/dayjaby/21d3c452b6c6f7905fe5418d39d26372) a bit and providing an etc/config.txt file with “set PWM_OUT 1234”. The vtol_type.cpp overwrites the pwm max values in a way that it shouldn’t. By setting VT_MOT_COUNT to 4 and moving the copter pwm channels to 1-4, vtol_type.cpp does not influence the fixed wing channels anymore.