I am stuck in my GPS ( ublox Neo-M8N) and when I go outside it didn’t turn blinking green, its big blue led is blinking always and the switch is blingking red.
Then I didn’t get the right outcomes from nsh (mavlink console) terminal, if you have a knowledge about it ,could you illuminate me please?Because I finished all the issues about GPS in discuss forum but I didn’t find the solution, this is the output that I got in terminal:
nsh> gps status
INFO [gps] Main GPS
INFO [gps] protocol: UBX
INFO [gps] status: OK, port: /dev/ttyS0, baudrate: 115200
INFO [gps] sat info: disabled
INFO [gps] rate reading: 697 B/s
INFO [gps] rate position: 5.00 Hz
INFO [gps] rate velocity: 5.00 Hz
INFO [gps] rate publication: 5.00 Hz
INFO [gps] rate RTCM injection: 0.00 Hz
sensor_gps_s
timestamp: 72835397 (0.108428 seconds ago)
time_utc_usec: 1638873994399840
device_id: 11010053 (Type: 0xA8, SERIAL:0 (0x00))
lat: 410004809
lon: 291825571
alt: 179859
alt_ellipsoid: 217397
s_variance_m_s: 1000.0010
c_variance_rad: 3.1416
eph: 4294967.5000
epv: 4294967.5000
hdop: 99.9900
vdop: 99.9900
noise_per_ms: 102
jamming_indicator: 6
vel_m_s: 0.0000
vel_n_m_s: 0.0000
vel_e_m_s: 0.0000
vel_d_m_s: 0.0000
cog_rad: 0.0000
timestamp_time_relative: 0
heading: nan
heading_offset: 0.0000
automatic_gain_control: 1248
fix_type: 0
jamming_state: 0
vel_ned_valid: False
satellites_used: 0
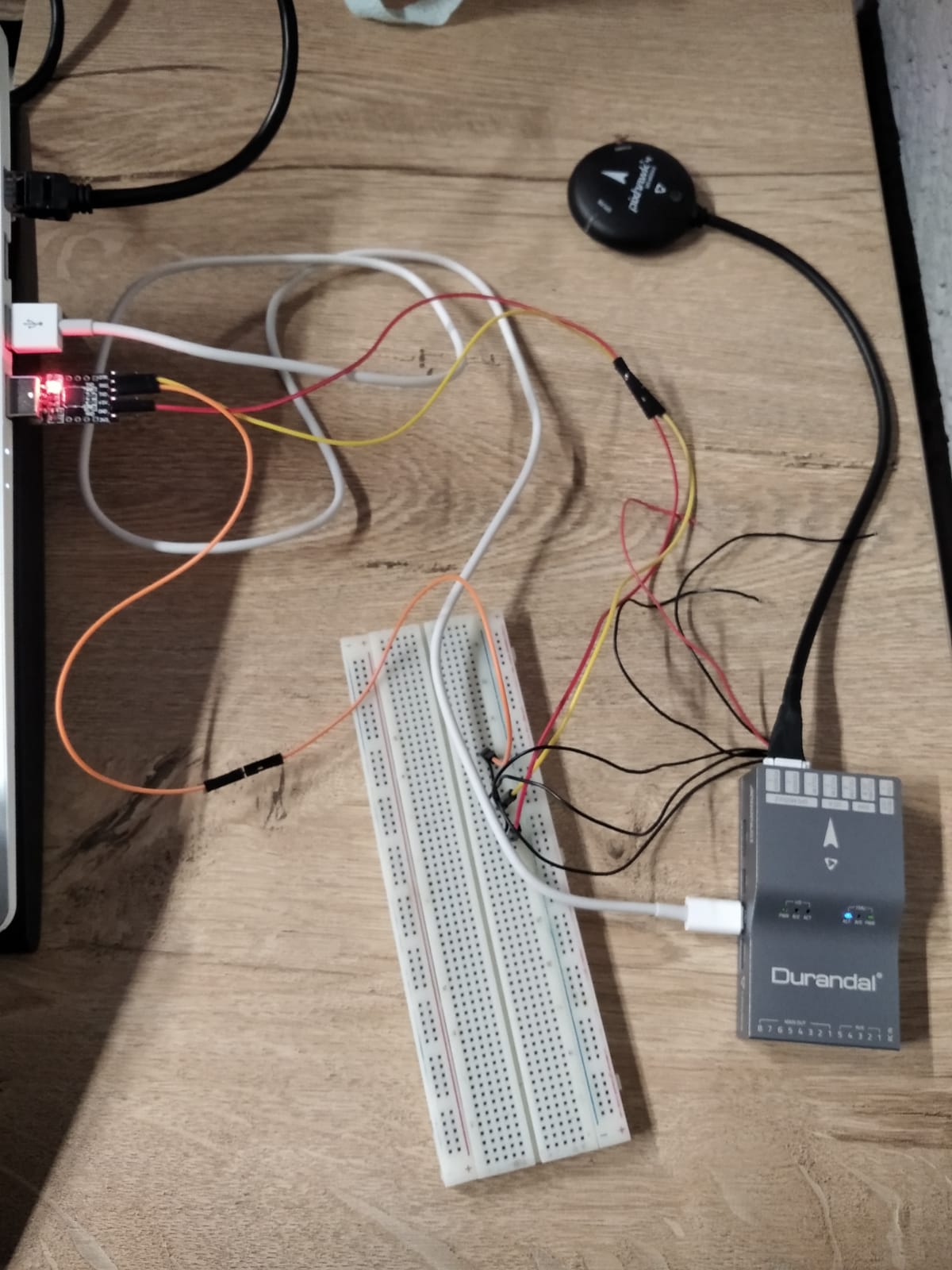
I suggest that you connect all the standard factory cables for the GPS, switch, buzzer, etc., (that came in the original shipping box) to the Pixhawk, without any of the additional wires going through the breadboard, mount it on the quadcopter without propellors, take it outdoors, and try to start the aircraft. That will tell you if the system is working or not. Usually the problems with a Pixhawk have to do with the compass and calibration. If the system works, then starting adding in the extra wires you have attached to the breadboard one by one, checking to see if the aircraft still starts after each change. You will eventually identify the source of the problem. With a Pixhawk, it will either work beautifully or it won’t work at all. They work best when you only use the parts that came in the original box. Changing parts like the GPS or cables just leads to frustration because they often do not match between manufacturers. If it gets frustrating, sleep on it and the answer may come to you.
I will mount it but simply I made my pc as a companion computer before the calibration, RC settings etc. but Does it make any change in my error mounting frame? I didn’t get the logic behind it.
I connect GPS module without any other connections (breadboard) and go outside but I got the same error. Is there anything you know about that error. Because first connection that I made GPS module works fine, now it is not. I didn’t change any parameter I just changed airframe, may error depend on it?
Your initial post of the output of gps status shows that the Pixhawk is talking to the GPS. The last line of that output is important -
satellites_used: 0
That means that the GNSS device is working but can’t see any GNSS satellites in the sky. This can be caused by a few things, including:
Being indoors (especially with thick walls/ceilings)
Being in an urban canyon.
GPS initialization time
Bad antenna
Those hockey puck modules usually have the antenna built in, so the last one is unlikely. When the devices are first booted in a new region they take a while to “learn” the constellations and figure out where they are. Often you just need to give it time.
The best bet is to get on a roof or open field (with a clear view of the southern sky if in the northern hemisphere) and let the GNSS device get a fix. If you put it near a window (southern facing towards the equator if you can) and run the nsh gps status command you should start seeing the satellite count go up, although not as high as when you are outdoors.
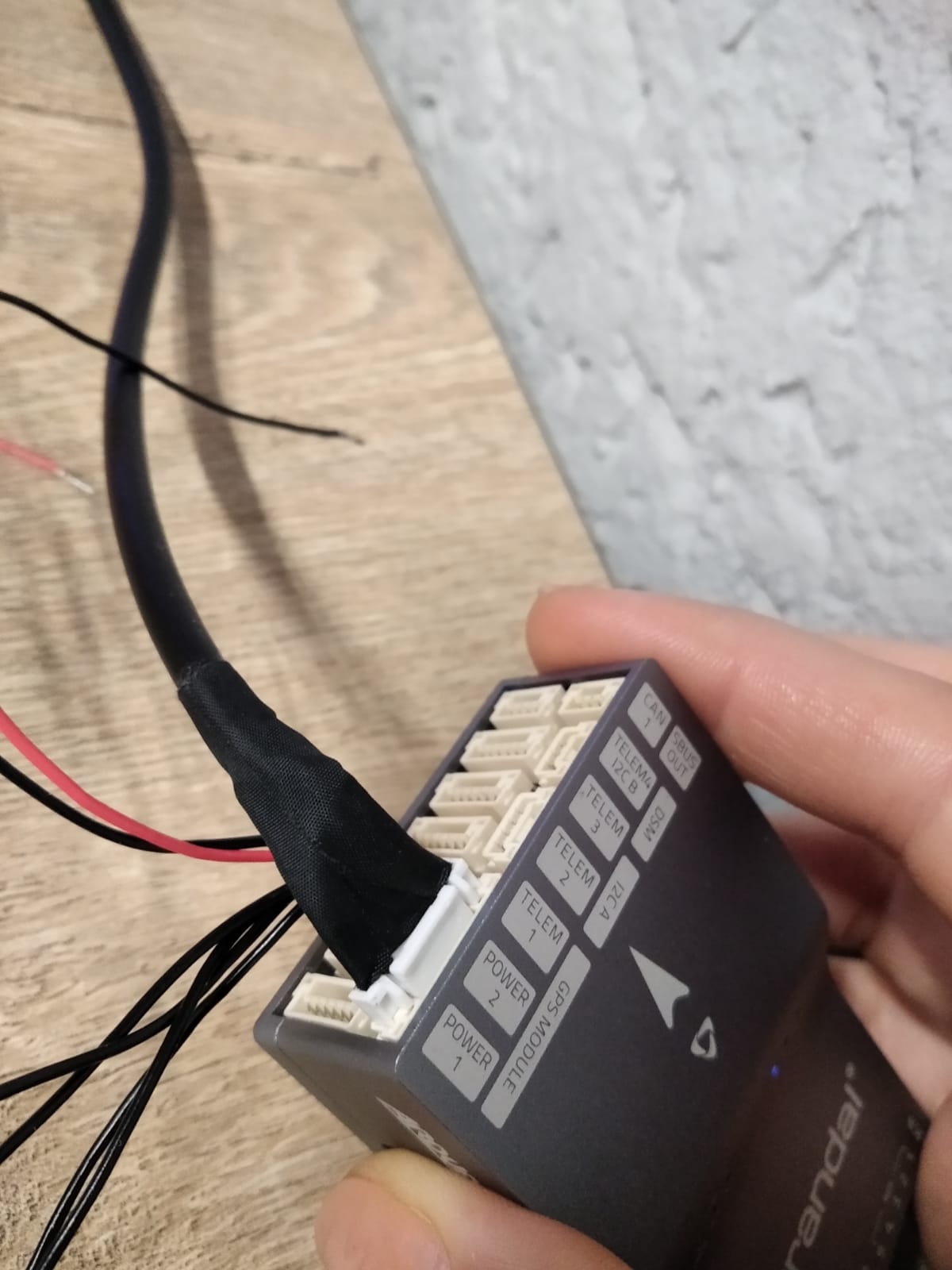
Just for dibs, take a magnifier and inspect the pins where the GPS plugs into the FC and make sure that none of them are bent. Ask me how I know… Also inspect the GPS connector.
You can always use UAV Forecast to get an idea how many satellites are available in your area.