Hello all. I will receive these parts in a few days and have never used them. I don’t see a schematic for these 2 modules and many schematics online show connecting the IO PWM OUT to an ESC, but I have been using chatgpt says I must use FMU PWM. There is no clear drawing anywhere that shows how to connect the current pin from the Tekko. I am trying to get this running as quickly as possible so if someone can consult me for a fee to get this wired that would be an option as well. I have only glanced at QGC on my android Skydroid G12 and it is connected to the skydroid GR01 but can’t do much without the Pixhawk connected which will be soon. Thanks!
Hi There!
You can use either the IO PWM OUT or the FMU PWM OUT port of the Pixhawk 6c. Then you just need to set it up correctly in QGC, under Actuators/Actuator Outputs.
Tekko F4 Wiring
Does that clarify things a bit?
On the topic of the 6C, I’m trying to connect a Pixhawk 6C Pro autopilot to a Skydroid R16 receiver.
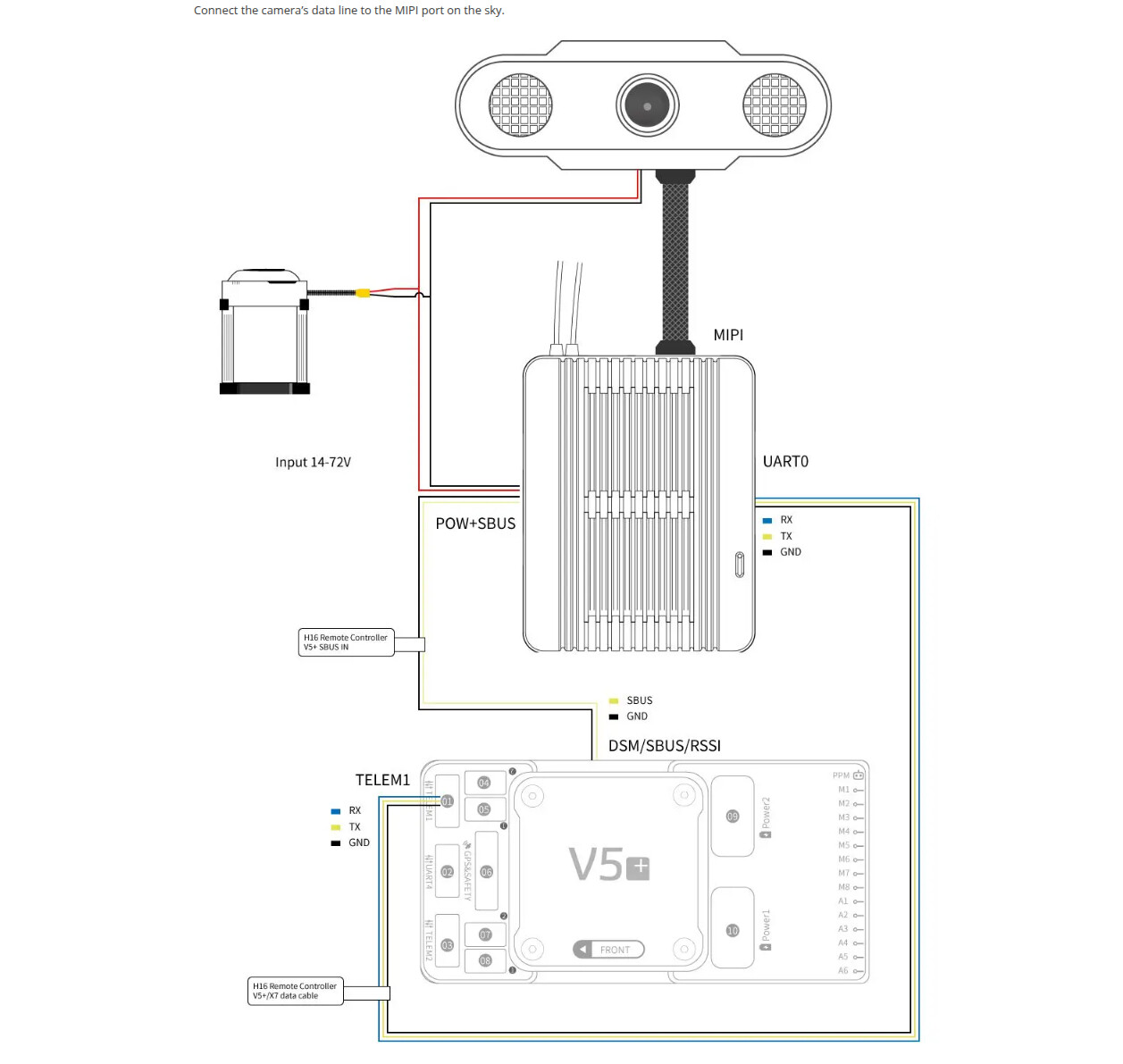
The manuals seem to indicate I should connect the Pixhawk 6C Pro “PPM/SBUS RC” output to the R16’s “POW+SBUS” port.
I did this but get no power on the R16.
The R16 needs a minimum of 7.2v but the 6C output is only around 5.2v. That could be the problem. Or maybe there’s no power out of the 6C from the “PPM/SBUS RC” output.
Can anyone please give me some pointers on how to power the R16 receiver from the Pixhawk 6C Pro?
Do I need a Y harness with two leads from the power board to two pins on the R16’s POW+SBUS" port, along with the cables from the SBUS from the Pixhawk 6C?
Thanks for any help…
Thanks for the wiring link, that is gold.
Hi, thanks for the reply.
I’m new to this tech so am not sure what I am trying to do exactly but my goal is to power the R16 receiver. I don’t know if it has an internal battery (I haven’t read about it) but it has a port called BATT+SBUS so I believe this is power IN. I’m not trying to charge but to power the R16.
That image of yours is what I was picturing. Is that normal when setting up Pixhawk 6C Pro to the Skydroid R16? No other way around it?
Why would a BEC be used if I could power it from the power board output?
Thanks for your help, much appreciated!
What do you mean by power board? (Asking because this may be the solution of your problem)
How do you plan on powering your Pixhawk 6C Pro?
Ignore the internal battery for now.
I think that diagram is illustrative, but not certain as mine is a 6C Pro, not a V5. I will try the 6C’s PPM/SBUS to the R16’s BATT+SBUS, and the powerboard also to the R16’s BATT+SBUS.
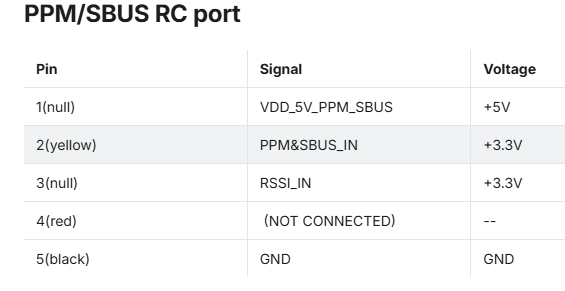
Which of these five pins out of the 6C’s PPM/SBUS port do I send to the R16’s BATT+SBUS? Obviously the #5 pin (GND). But which of the other four?
Powerboard is maybe the wrong term but the main battery goes to a PM02 Power Module via XT60 connection.
The PM02 Power Module sends power via XT60 connection to a power distribution circuit board which has 6 x XT30 outputs: 4 for the motors and 2 for accessories. I call it the powerboard.
The PM02 Power Module also splits off to about a 5-wire cable which runs to the Pixhawk 6C’s POWER input. This powers the 6C.
I think that’s how it’s meant to be set up.
If it helps, the drone is a Holybro X500 V2.
Once I can power the receiver, I can try to bind the R16 to the H16. Then the next steps as I figure it out.
I’d assume 2 PPM&SBUS_IN goes to the R16’s SBUS Pin, and GND as you said.
Note that this will only give you the RC/SBUS signal, but no telemetry data transfer, which requires the UART to be connected.
You need to connect the power of the R16 to the XT30 Acessory port, for it to work properly then.
Okay, this is the conclusion I came to but it’s good to have it confirmed.
Can you confirm there is no (or not enough) power from the 6C’s PPM SBUS port out to power the R16 if I ran a cable from there to the R16 (all pins)?
Thanks for the help…
The issue is the voltage that is too low (5V instead of 7.2V). The current limit would not be an issue I assume.
So do not do it!