I am looking for a way to power a companion computer (RPi4) on my quad, which uses the PM07-12S Power Module as power management unit. Apparently some people have similar questions, but since they all got no answer as far as I could see it would be much appreciated to get some insight if someone of you has found anything for that:)
Assuming you are using a Pixhawk 4 there are a few options to piggy back the 5vdc out to any device like a RPI4 if you don’t wish to add an extra BEC.
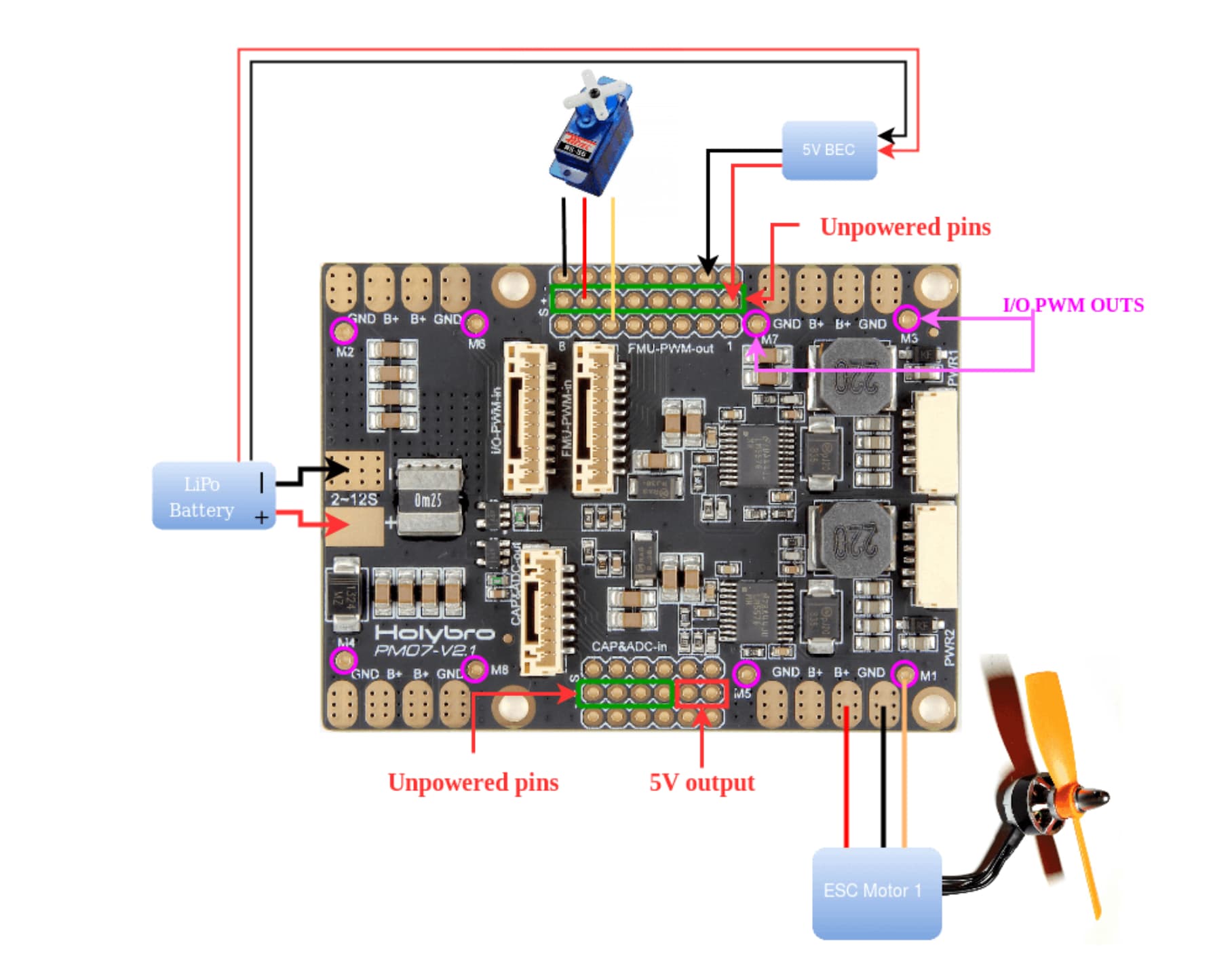
If you have powered the servo bus via an external BEC as suggested then use a spare servo connector as long as your RPI4 power draw is low (your external BEC being the real limit on the current here).
You can also use the 5vdc out down on the CAP and ADC in connector where 5v and 0v are marked.
If you are handy soldering you can make a piggy back lead splitter off either of the two PWR1 or 2 leads from the PM07 to the Pixhawk 4 and take this to your RPI4, on the RPI you use either the Micro USB or GPIO connector to feed the 5vdc in.
If you are only using one of the PWR ports for your Pixhawk then use the PWR2 lead and split off the 5vdc and GND to power your RPI4.
NB - PM07 is for the older Pixhawk 4 and not the newer 5x etc autopilots - they use a digital link for the esc and current data.
Thanks very much!
I am using a Pixhawk 4. I think I’ll go with the PWR2 lead and solder the VCC and GND to a USB-C cable to make use of the voltage control.
Is there any downside of not using a BEC in this case?
I have the PM07-V2.3. Do you think It’ll work with that?
I wouldn’t bother soldering to a USB-C cable. In my opinion, it’s easy to have such a cable get lose with the vibrations in air. Instead I would use a separate 5v BEC and connect that to the RPi headers.
You can use the 5v from the power module but I would be careful regarding power usage of the RPi. If it draws too much it will bring the voltage of the Pixhawk 4 as well, and you might end up with no autopilot mid-air which usually doesn’t end well. If you use a separate BEC, you don’t run that risk.
okay, that’s really good to know with the voltage. From where should I draw the power for the BEC, I mean specifically how to wire it?
I already use the headers for a Cellular hat. Can I still use the headers as power port if I use longer headers?
am I correct to just use one of those ports on the top where 5v BEC is noted? If yes then I should wire it so that one the BEC wires from this port to my RPi, correct?
or should I solder the BEC directly to the battery and then to the RPi?
I would also caution to have servos and the RPi on the same BEC. If it’s a bigger servo, it might draw quite a bit from the BEC and your RPi will reboot. So again, you need to figure out how much the different pieces consume at peak and then check what the BECs can provide.
Regarding wiring, what you suggest should be possible, however, I don’t know the schematic of that power board, and whether the 5v rail is unconnected or just not powered but e.g. could be powered in software, or back-power your board.
Yup, separate BEC for the RPI is best.
If not split the power from the PWR1 or 2 and take it to the RPI, I would use the GPIO in.
If you do use the USB, I always drop a blob of low melt hot glue on USB and HDMI connector’s to stop them wriggling out.