This is my first time building my own plane, first time using the forum and first time at using a Pixhawk, so please bear with me if I’m posting in the wrong place or asking stupid questions I’m sure this has all been asked and answered before.
I’ve done as much research as I can and used the various Wiki’s and YouTube etc to learn and collate the information, I believe the below diagrams to be correct but would really like someone to cast their eye over it and point out where ad if I’ve got it wrong. I’m really keen to learn, so haven’t just jumped on here and asked for someone to tell me how to do it as I’d be cheating myself there! So have created a few diagrams of which you might tell me that one is better than the other, or, they are completely wrong! So please help me if you can.
The assumed build would be lets say a Mini Talon, so one motor and various servos, and I’ve got a Holybro Pixhawk 4 with the PM07 board.
Hopefully, from the various manuals and info I’ve found online already I’ve got that correct, I’m not new to drones by any means, just have never invested the time into building them myself, so once I’ve got the theory right I’d like to try all manner of builds, but don’t want to blow up my first purchase before even getting it into the air!
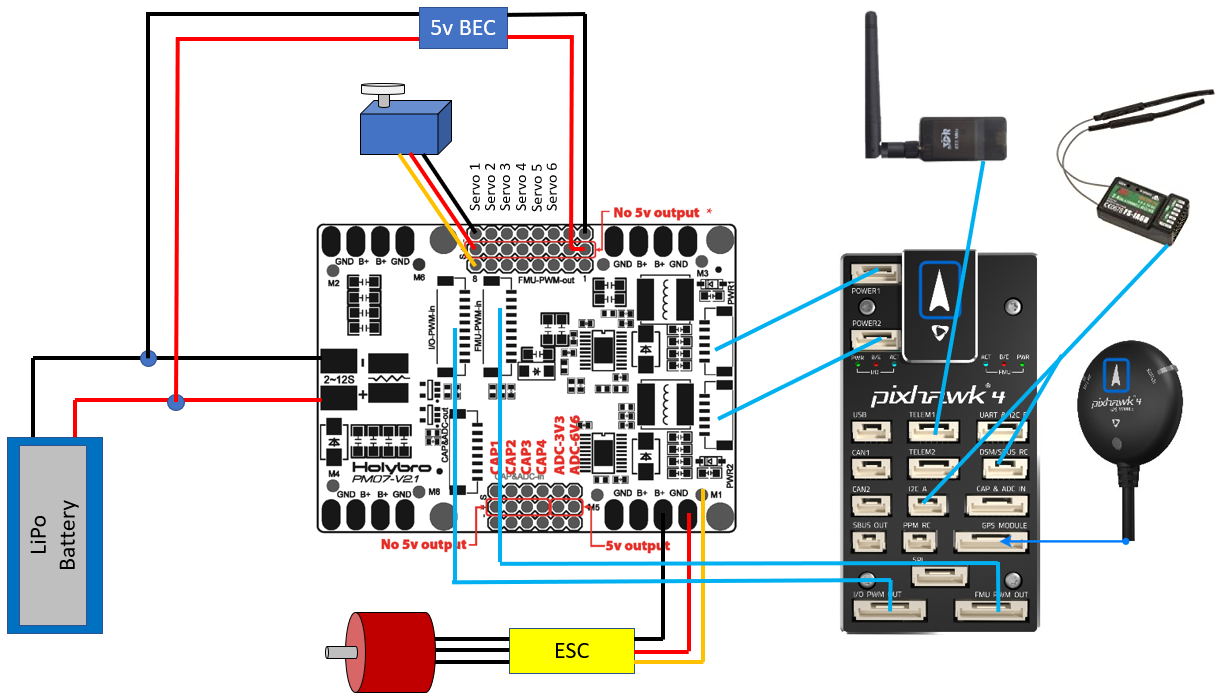
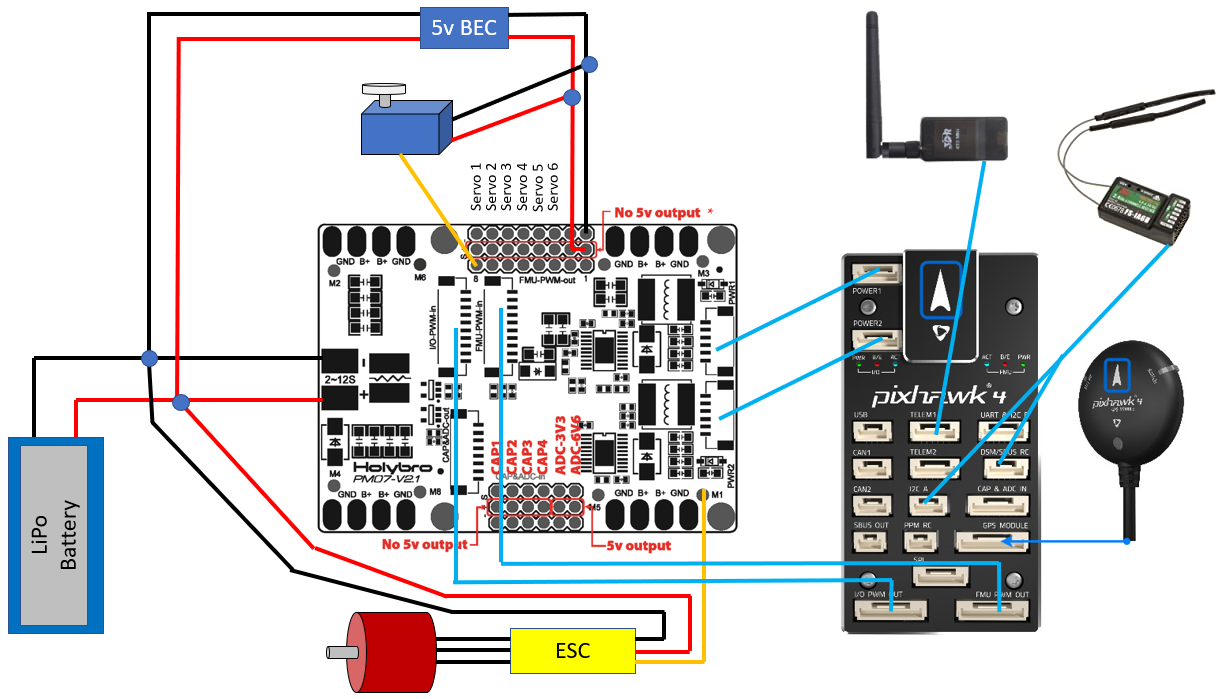
if you connect the motor’s ESC directly to the battery, you won’t be able to measure/see/log the motor current. I recommend you to connect the ESC to the PM07 “GND and B+” as shown in Option #1.
The Servo “~” cables have to be connected to the MAIN ports, please see
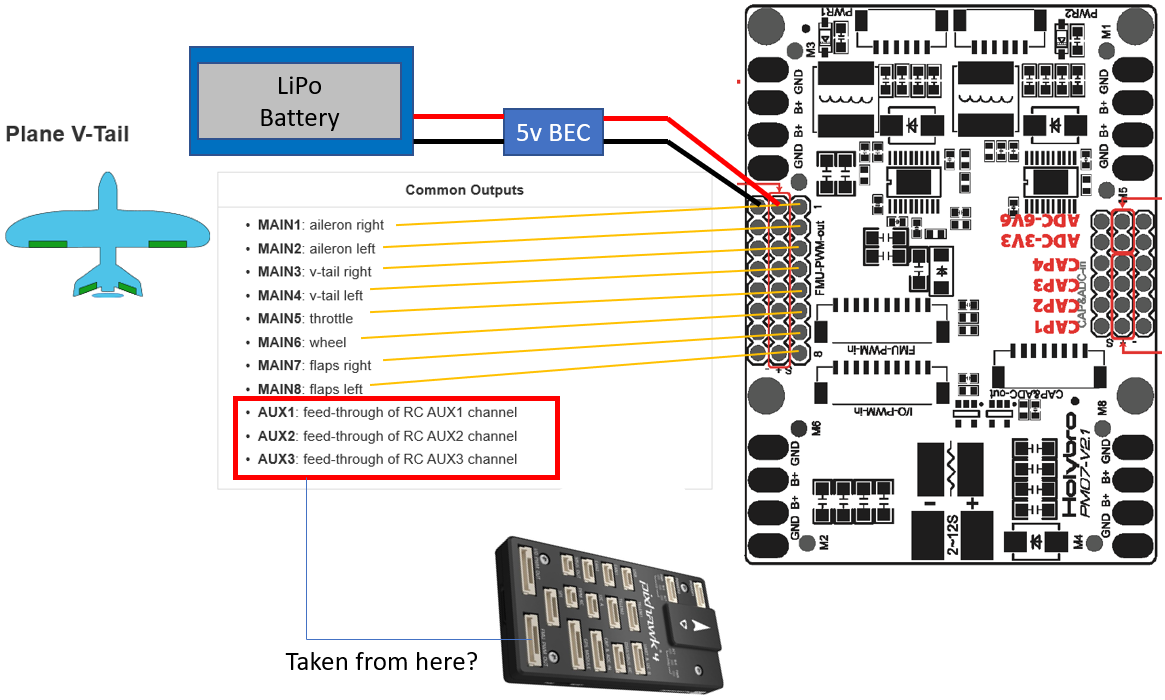
Thank you for your quick response with this, I’ve included another sketch with what I think I understand from that! I’ve also had a look at the link you sent too. Could you please clarify if this now looks correct? The only confusion I then have is where to take the AUX 1, 2 & 3 from as pictured.
I have the Holybro kit that contains the Ext-8p & Ext-6p boards, do I use these as the extension for the extra AUX ports or is it taken in line from the Pixhawk before the PM07 as I’ve drawn.
Again, sorry for the what will seem to you guys like stupid questions, I’m just trying to bust my way through what looks like a new language to me at the moment. The information is out there already I’m sure, but is still quite alien to me!
Hi Nick,
no worries, I had the same problems 3 months ago ;-), the documentation is quite sparse here!
No, the MAIN-ports are the tiny round soldering contacts on the board (red circles in picture below) that are labeled with “M1”, “M2”…“M8”. As I have never used the AUX-Ports I cannot tell you where to find them, sorry. Might be the FMU-PWM-out-ports that you marked but I am not sure. Would be nice if you could let me know if you find out about it!
Any info on thi topic regarding the aux ports. Building a VTOL Skyhunter motors connected to M1 > M5 on the PM07 board and the servos on I believe on the servo main output pins FMU-PWM out as shown in the picture above. However, only motor response and no servo response…
Does anybody has some info about how tos setup the PX4FC with an PM07 power managen board??
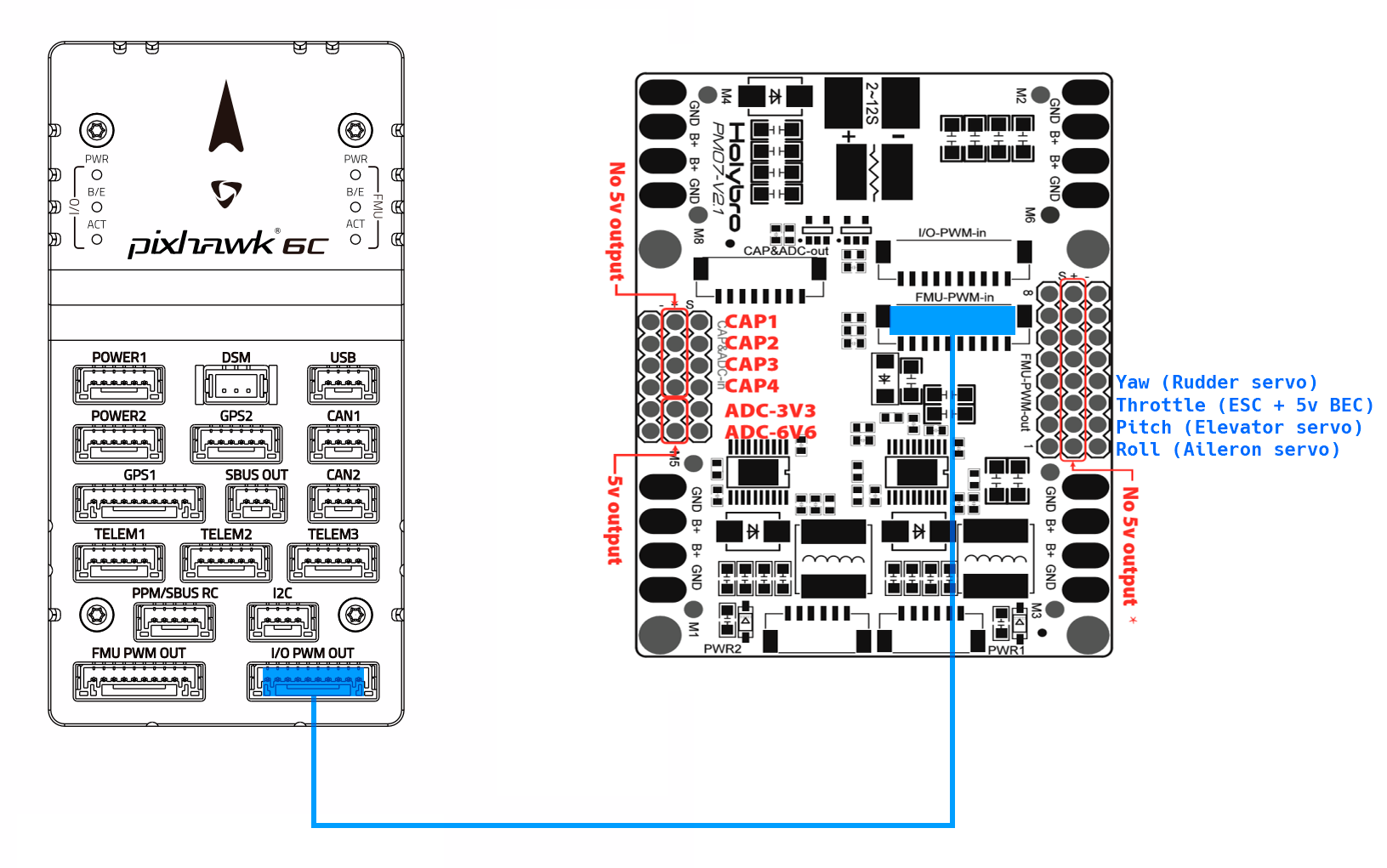
A small hack for beginners (like me) who are looking for the easiest way to make a plane on Pixhawk and PM07. You lose AUX1-8, but the pins will have MAIN1-8.
The power wires from the ESC (thick wires ±) will still have to be soldered to the PM07, but with the signal wire everything becomes much easier.