Can anybody guide me where is motor test module in QGround control like mission planner I have build a quadrotor and want to test the motors
ArduPilot Motor Test is not currently supported in QGC. I thought maybe the ArduSub folks were going to turn it on, but I guess not.
Ok, so how to check whether motors are in sync by arming the copter without propellers or there is some other solution to this?
Can’t remember, does ArduPilot support the mavlink console? If so I think you can do it using a command from there.
I’ll also take quick look at it. I implemented MotorTest ages ago, but backed it out because of the way ArduPilot does motor testing on some (strange to me) A/B/C motor sequencing as opposed to using actual motor output numbers. Might be trivial to bring it back with the A/B/C sequencing.
Daily builds now include support for ArduPilot motor testing:
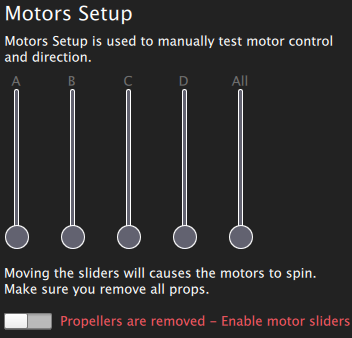
how did you get into this window I mean where is it ?
It’s one of the Setup pages.
The way I do it is using the Tx to power up the motors in MANUAL mode. It runs all the motors at the same time, but you can see if each one is turning in the right direction. This procedure assumes you have all electronics hooked up and functional, because it is basically a test of the entire system.
Joe
It is truly dumbfounding how the simplest of steps in the learning process are continually just…absent. This issue is clearly not resolved especially considering px4 documentation mentions repeatedly that a radio link is not even required. So why a tx to spin motors?
1 Like