I figured I should at least post an update and see if someone wanted to engage, or has the same issue. By the way, I’m using the most recent master (1.9.0dev) build, I think I forgot to mention this earlier.
I has a BAUD mismatch with the Xbees so I fixed that and I can wirelessly get a reliable heartbeat at 115200 BAUD. From there I can feed MoCap data to my vehicle on the “mavros/vision_pose/pose” topic. I set the “EKF2_AID_MASK” to 24 and “EKF2_HGT_MODE” to 3 (vision). I can query the rostopics “mavros/vision_pose/pose”, “mavros/state”, and “mavros/imu/data” just fine. However, there are a few concerning things going on. In “/diagnostics” the “AHRS subsystem health” is “fail”. Also I cannot echo the rostopics: mavros/imu/data_raw or mavros/local_position/pose. This makes me believe that I don’t have a position lock. Additionally, I am able to use my RC controller to switch into “Position” mode, but the motors just idle (again, I think its the position lock issue). Also the output from “px4.launch” is "HP: requesting home position" repeatedly. I’m not sure what the issue is here and I would really appreciate some outside input as I am working alone.
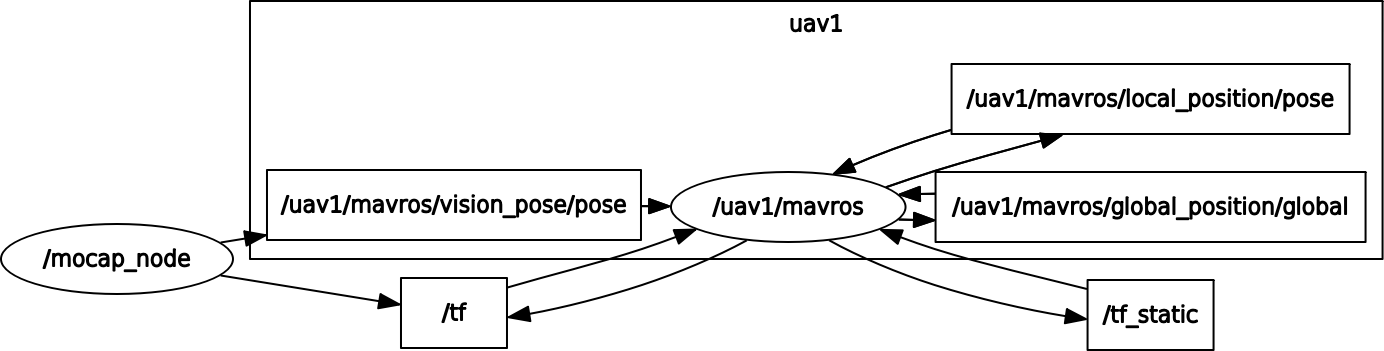
Below I have put the outputs from px4.launch, rostopic list, /diagnostics, and an image of my “rqt_graph”
started roslaunch server http://odysseus:46483/
SUMMARY
CLEAR PARAMETERS
PARAMETERS
- /mocap_node/rigid_bodies/1/frame_id: uav/base_link
- /mocap_node/rigid_bodies/1/pose2d: uav/ground_pose
- /mocap_node/rigid_bodies/1/pose: uav/pose
- /rosdistro: kinetic
- /rosversion: 1.12.14
- /uav1/mavros/cmd/use_comp_id_system_control: False
- /uav1/mavros/conn/heartbeat_rate: 1.0
- /uav1/mavros/conn/system_time_rate: 1.0
- /uav1/mavros/conn/timeout: 10.0
- /uav1/mavros/conn/timesync_rate: 0.0
- /uav1/mavros/distance_sensor/hrlv_ez4_pub/field_of_view: 0.0
- /uav1/mavros/distance_sensor/hrlv_ez4_pub/frame_id: hrlv_ez4_sonar
- /uav1/mavros/distance_sensor/hrlv_ez4_pub/id: 0
- /uav1/mavros/distance_sensor/hrlv_ez4_pub/orientation: PITCH_270
- /uav1/mavros/distance_sensor/hrlv_ez4_pub/send_tf: True
- /uav1/mavros/distance_sensor/hrlv_ez4_pub/sensor_position/x: 0.0
- /uav1/mavros/distance_sensor/hrlv_ez4_pub/sensor_position/y: 0.0
- /uav1/mavros/distance_sensor/hrlv_ez4_pub/sensor_position/z: -0.1
- /uav1/mavros/distance_sensor/laser_1_sub/id: 3
- /uav1/mavros/distance_sensor/laser_1_sub/orientation: PITCH_270
- /uav1/mavros/distance_sensor/laser_1_sub/subscriber: True
- /uav1/mavros/distance_sensor/lidarlite_pub/field_of_view: 0.0
- /uav1/mavros/distance_sensor/lidarlite_pub/frame_id: lidarlite_laser
- /uav1/mavros/distance_sensor/lidarlite_pub/id: 1
- /uav1/mavros/distance_sensor/lidarlite_pub/orientation: PITCH_270
- /uav1/mavros/distance_sensor/lidarlite_pub/send_tf: True
- /uav1/mavros/distance_sensor/lidarlite_pub/sensor_position/x: 0.0
- /uav1/mavros/distance_sensor/lidarlite_pub/sensor_position/y: 0.0
- /uav1/mavros/distance_sensor/lidarlite_pub/sensor_position/z: -0.1
- /uav1/mavros/distance_sensor/sonar_1_sub/id: 2
- /uav1/mavros/distance_sensor/sonar_1_sub/orientation: PITCH_270
- /uav1/mavros/distance_sensor/sonar_1_sub/subscriber: True
- /uav1/mavros/fake_gps/eph: 2.0
- /uav1/mavros/fake_gps/epv: 2.0
- /uav1/mavros/fake_gps/fix_type: 3
- /uav1/mavros/fake_gps/geo_origin/alt: 408.0
- /uav1/mavros/fake_gps/geo_origin/lat: 47.3667
- /uav1/mavros/fake_gps/geo_origin/lon: 8.55
- /uav1/mavros/fake_gps/gps_rate: 5.0
- /uav1/mavros/fake_gps/mocap_transform: False
- /uav1/mavros/fake_gps/satellites_visible: 5
- /uav1/mavros/fake_gps/tf/child_frame_id: fix
- /uav1/mavros/fake_gps/tf/frame_id: map
- /uav1/mavros/fake_gps/tf/listen: False
- /uav1/mavros/fake_gps/tf/rate_limit: 10.0
- /uav1/mavros/fake_gps/tf/send: True
- /uav1/mavros/fake_gps/use_mocap: False
- /uav1/mavros/fake_gps/use_vision: True
- /uav1/mavros/fcu_protocol: v2.0
- /uav1/mavros/fcu_url: /dev/ttyUSB0:115200
- /uav1/mavros/gcs_url: udp://@localhost:…
- /uav1/mavros/global_position/child_frame_id: base_link
- /uav1/mavros/global_position/frame_id: map
- /uav1/mavros/global_position/gps_uere: 1.0
- /uav1/mavros/global_position/rot_covariance: 99999.0
- /uav1/mavros/global_position/tf/child_frame_id: base_link
- /uav1/mavros/global_position/tf/frame_id: map
- /uav1/mavros/global_position/tf/global_frame_id: earth
- /uav1/mavros/global_position/tf/send: False
- /uav1/mavros/global_position/use_relative_alt: True
- /uav1/mavros/image/frame_id: px4flow
- /uav1/mavros/imu/angular_velocity_stdev: 0.000349065850399
- /uav1/mavros/imu/frame_id: base_link
- /uav1/mavros/imu/linear_acceleration_stdev: 0.0003
- /uav1/mavros/imu/magnetic_stdev: 0.0
- /uav1/mavros/imu/orientation_stdev: 1.0
- /uav1/mavros/local_position/frame_id: map
- /uav1/mavros/local_position/tf/child_frame_id: base_link
- /uav1/mavros/local_position/tf/frame_id: map
- /uav1/mavros/local_position/tf/send: False
- /uav1/mavros/local_position/tf/send_fcu: False
- /uav1/mavros/mission/pull_after_gcs: True
- /uav1/mavros/mocap/use_pose: True
- /uav1/mavros/mocap/use_tf: False
- /uav1/mavros/odometry/in/child_frame_id: base_link
- /uav1/mavros/odometry/in/frame_id: odom
- /uav1/mavros/odometry/in/frame_tf/body_frame_orientation: flu
- /uav1/mavros/odometry/in/frame_tf/local_frame: local_origin_ned
- /uav1/mavros/odometry/out/frame_tf/body_frame_orientation: frd
- /uav1/mavros/odometry/out/frame_tf/local_frame: vision_ned
- /uav1/mavros/plugin_blacklist: [‘safety_area’, '…
- /uav1/mavros/plugin_whitelist: [‘sys_*’, 'fake_g…
- /uav1/mavros/px4flow/frame_id: px4flow
- /uav1/mavros/px4flow/ranger_fov: 0.118682389136
- /uav1/mavros/px4flow/ranger_max_range: 5.0
- /uav1/mavros/px4flow/ranger_min_range: 0.3
- /uav1/mavros/safety_area/p1/x: 1.0
- /uav1/mavros/safety_area/p1/y: 1.0
- /uav1/mavros/safety_area/p1/z: 1.0
- /uav1/mavros/safety_area/p2/x: -1.0
- /uav1/mavros/safety_area/p2/y: -1.0
- /uav1/mavros/safety_area/p2/z: -1.0
- /uav1/mavros/setpoint_accel/send_force: False
- /uav1/mavros/setpoint_attitude/reverse_thrust: False
- /uav1/mavros/setpoint_attitude/tf/child_frame_id: target_attitude
- /uav1/mavros/setpoint_attitude/tf/frame_id: map
- /uav1/mavros/setpoint_attitude/tf/listen: False
- /uav1/mavros/setpoint_attitude/tf/rate_limit: 50.0
- /uav1/mavros/setpoint_attitude/use_quaternion: False
- /uav1/mavros/setpoint_position/mav_frame: LOCAL_NED
- /uav1/mavros/setpoint_position/tf/child_frame_id: target_position
- /uav1/mavros/setpoint_position/tf/frame_id: map
- /uav1/mavros/setpoint_position/tf/listen: False
- /uav1/mavros/setpoint_position/tf/rate_limit: 50.0
- /uav1/mavros/setpoint_raw/thrust_scaling: 1.0
- /uav1/mavros/setpoint_velocity/mav_frame: LOCAL_NED
- /uav1/mavros/startup_px4_usb_quirk: True
- /uav1/mavros/sys/disable_diag: False
- /uav1/mavros/sys/min_voltage: 10.0
- /uav1/mavros/target_component_id: 240
- /uav1/mavros/target_system_id: 1
- /uav1/mavros/tdr_radio/low_rssi: 40
- /uav1/mavros/time/time_ref_source: fcu
- /uav1/mavros/time/timesync_avg_alpha: 0.6
- /uav1/mavros/time/timesync_mode: MAVLINK
- /uav1/mavros/vibration/frame_id: base_link
- /uav1/mavros/vision_pose/tf/child_frame_id: vision_estimate
- /uav1/mavros/vision_pose/tf/frame_id: map
- /uav1/mavros/vision_pose/tf/listen: False
- /uav1/mavros/vision_pose/tf/rate_limit: 30.0
- /uav1/mavros/vision_speed/listen_twist: True
- /uav1/mavros/vision_speed/twist_cov: True
- /uav1/mavros/wheel_odometry/child_frame_id: base_link
- /uav1/mavros/wheel_odometry/count: 2
- /uav1/mavros/wheel_odometry/frame_id: map
- /uav1/mavros/wheel_odometry/send_raw: True
- /uav1/mavros/wheel_odometry/send_twist: False
- /uav1/mavros/wheel_odometry/tf/child_frame_id: base_link
- /uav1/mavros/wheel_odometry/tf/frame_id: map
- /uav1/mavros/wheel_odometry/tf/send: True
- /uav1/mavros/wheel_odometry/use_rpm: False
- /uav1/mavros/wheel_odometry/vel_error: 0.1
- /uav1/mavros/wheel_odometry/wheel0/radius: 0.05
- /uav1/mavros/wheel_odometry/wheel0/x: 0.0
- /uav1/mavros/wheel_odometry/wheel0/y: -0.15
- /uav1/mavros/wheel_odometry/wheel1/radius: 0.05
- /uav1/mavros/wheel_odometry/wheel1/x: 0.0
- /uav1/mavros/wheel_odometry/wheel1/y: 0.15
NODES
/uav1/
mavros (mavros/mavros_node)
/
mocap_node (mocap_optitrack/mocap_node)
auto-starting new master
process[master]: started with pid [20581]
ROS_MASTER_URI=http://localhost:11311
setting /run_id to b59f996e-5139-11e9-a663-9cb6d0f485cf
process[rosout-1]: started with pid [20594]
started core service [/rosout]
process[uav1/mavros-2]: started with pid [20612]
process[mocap_node-3]: started with pid [20613]
[ INFO] [1553764391.908736519]: FCU URL: /dev/ttyUSB0:115200
[ INFO] [1553764391.910374583]: serial0: device: /dev/ttyUSB0 @ 115200 bps
[ INFO] [1553764392.014270568]: GCS URL: udp://@localhost:14550
[ INFO] [1553764392.014861836]: udp1: Bind address: 0.0.0.0:14555
[ INFO] [1553764392.015028323]: udp1: Remote address: 127.0.0.1:14550
[ INFO] [1553764392.021401777]: Plugin 3dr_radio blacklisted
[ INFO] [1553764392.034935391]: Plugin actuator_control loaded
[ INFO] [1553764392.042133373]: Plugin actuator_control initialized
[ INFO] [1553764392.047802888]: Plugin adsb loaded
[ INFO] [1553764392.055178291]: Plugin adsb initialized
[ INFO] [1553764392.055460188]: Plugin altitude loaded
[ INFO] [1553764392.057657794]: Plugin altitude initialized
[ INFO] [1553764392.057882608]: Plugin cam_imu_sync loaded
[ INFO] [1553764392.059139312]: Plugin cam_imu_sync initialized
[ INFO] [1553764392.059464815]: Plugin command loaded
[ INFO] [1553764392.071932355]: Plugin command initialized
[ INFO] [1553764392.072222771]: Plugin companion_process_status loaded
[ INFO] [1553764392.077373468]: Plugin companion_process_status initialized
[ INFO] [1553764392.077658410]: Plugin debug_value loaded
[ INFO] [1553764392.087497309]: Plugin debug_value initialized
[ INFO] [1553764392.087546030]: Plugin distance_sensor blacklisted
[ INFO] [1553764392.087864676]: Plugin fake_gps loaded
[ INFO] [1553764392.113647236]: Plugin fake_gps initialized
[ INFO] [1553764392.113909180]: Plugin ftp loaded
[ INFO] [1553764392.123580283]: Plugin ftp initialized
[ INFO] [1553764392.123743615]: Plugin global_position loaded
[ INFO] [1553764392.139627899]: Plugin global_position initialized
[ INFO] [1553764392.139758804]: Plugin gps_rtk loaded
[ INFO] [1553764392.142018160]: Plugin gps_rtk initialized
[ INFO] [1553764392.142060304]: Plugin hil blacklisted
[ INFO] [1553764392.142262437]: Plugin home_position loaded
[ INFO] [1553764392.145564788]: Plugin home_position initialized
[ INFO] [1553764392.145728663]: Plugin imu loaded
[ INFO] [1553764392.153543992]: Plugin imu initialized
[ INFO] [1553764392.153750438]: Plugin local_position loaded
[ INFO] [1553764392.159441211]: Plugin local_position initialized
[ INFO] [1553764392.159562258]: Plugin log_transfer loaded
[ INFO] [1553764392.162259251]: Plugin log_transfer initialized
[ INFO] [1553764392.162286903]: Plugin manual_control blacklisted
[ INFO] [1553764392.162405392]: Plugin mocap_pose_estimate loaded
[ INFO] [1553764392.166257840]: Plugin mocap_pose_estimate initialized
[ INFO] [1553764392.166290085]: Plugin obstacle_distance blacklisted
[ INFO] [1553764392.166314871]: Plugin odom blacklisted
[ INFO] [1553764392.166537867]: Plugin param loaded
[ INFO] [1553764392.169279509]: Plugin param initialized
[ INFO] [1553764392.169305660]: Plugin px4flow blacklisted
[ INFO] [1553764392.169327866]: Plugin rangefinder blacklisted
[ INFO] [1553764392.169344562]: Plugin rc_io blacklisted
[ INFO] [1553764392.169362465]: Plugin safety_area blacklisted
[ INFO] [1553764392.169515049]: Plugin setpoint_accel loaded
[ INFO] [1553764392.172660509]: Plugin setpoint_accel initialized
[ INFO] [1553764392.172918172]: Plugin setpoint_attitude loaded
[ INFO] [1553764392.182629666]: Plugin setpoint_attitude initialized
[ INFO] [1553764392.182792460]: Plugin setpoint_position loaded
[ INFO] [1553764392.195678638]: Plugin setpoint_position initialized
[ INFO] [1553764392.195708913]: Plugin setpoint_raw blacklisted
[ INFO] [1553764392.195838698]: Plugin setpoint_velocity loaded
[ INFO] [1553764392.201620516]: Plugin setpoint_velocity initialized
[ INFO] [1553764392.201982066]: Plugin sys_status loaded
[ INFO] [1553764392.211472264]: Plugin sys_status initialized
[ INFO] [1553764392.211630725]: Plugin sys_time loaded
[ INFO] [1553764392.216768556]: TM: Timesync mode: MAVLINK
[ INFO] [1553764392.217953805]: Plugin sys_time initialized
[ INFO] [1553764392.218089772]: Plugin trajectory loaded
[ INFO] [1553764392.222711004]: Plugin trajectory initialized
[ INFO] [1553764392.222733559]: Plugin vfr_hud blacklisted
[ INFO] [1553764392.222749715]: Plugin vibration blacklisted
[ INFO] [1553764392.222852698]: Plugin vision_pose_estimate loaded
[ INFO] [1553764392.229459403]: Plugin vision_pose_estimate initialized
[ INFO] [1553764392.229576252]: Plugin vision_speed_estimate loaded
[ INFO] [1553764392.233003872]: Plugin vision_speed_estimate initialized
[ INFO] [1553764392.233041079]: Plugin waypoint blacklisted
[ INFO] [1553764392.233058648]: Plugin wheel_odometry blacklisted
[ INFO] [1553764392.233070793]: Plugin wind_estimation blacklisted
[ INFO] [1553764392.233112250]: Autostarting mavlink via USB on PX4
[ INFO] [1553764392.233222385]: Built-in SIMD instructions: SSE, SSE2
[ INFO] [1553764392.233244599]: Built-in MAVLink package version: 2019.3.3
[ INFO] [1553764392.233270312]: Known MAVLink dialects: common ardupilotmega ASLUAV autoquad icarous matrixpilot paparazzi slugs standard uAvionix ualberta
[ INFO] [1553764392.233292901]: MAVROS started. MY ID 1.240, TARGET ID 1.240
[ INFO] [1553764393.176657797]: CON: Got HEARTBEAT, connected. FCU: PX4 Autopilot
[ WARN] [1553764395.180664299]: VER: broadcast request timeout, retries left 4
[ WARN] [1553764396.179255873]: VER: broadcast request timeout, retries left 3
[ WARN] [1553764402.179121079]: VER: unicast request timeout, retries left 2
[ INFO] [1553764403.177443891]: HP: requesting home position
[ WARN] [1553764407.181174134]: VER: unicast request timeout, retries left 1
[ WARN] [1553764407.181854282]: PR: request list timeout, retries left 2
[ WARN] [1553764408.183010643]: PR: request list timeout, retries left 1
[ WARN] [1553764409.183703879]: PR: request list timeout, retries left 0
[ WARN] [1553764412.186801537]: VER: unicast request timeout, retries left 0
[ INFO] [1553764413.176898788]: HP: requesting home position
[ WARN] [1553764417.189012767]: VER: your FCU don’t support AUTOPILOT_VERSION, switched to default capabilities
[ INFO] [1553764423.177623252]: HP: requesting home position
[ INFO] [1553764433.177757079]: HP: requesting home position
[ INFO] [1553764443.177226374]: HP: requesting home position
[ INFO] [1553764453.177163297]: HP: requesting home position
[ INFO] [1553764463.177830351]: HP: requesting home position
[ INFO] [1553764473.177638043]: HP: requesting home position
[ INFO] [1553764483.177478144]: HP: requesting home position
[ INFO] [1553764493.177867021]: HP: requesting home position
/diagnostics
/rosout
/rosout_agg
/tf
/tf_static
/uav/ground_pose
/uav1/mavlink/from
/uav1/mavlink/to
/uav1/mavros/actuator_control
/uav1/mavros/adsb/send
/uav1/mavros/adsb/vehicle
/uav1/mavros/altitude
/uav1/mavros/battery
/uav1/mavros/cam_imu_sync/cam_imu_stamp
/uav1/mavros/companion_process/status
/uav1/mavros/debug_value/debug
/uav1/mavros/debug_value/debug_vector
/uav1/mavros/debug_value/named_value_float
/uav1/mavros/debug_value/named_value_int
/uav1/mavros/debug_value/send
/uav1/mavros/extended_state
/uav1/mavros/fake_gps/vision
/uav1/mavros/global_position/compass_hdg
/uav1/mavros/global_position/global
/uav1/mavros/global_position/gp_lp_offset
/uav1/mavros/global_position/gp_origin
/uav1/mavros/global_position/home
/uav1/mavros/global_position/local
/uav1/mavros/global_position/raw/fix
/uav1/mavros/global_position/raw/gps_vel
/uav1/mavros/global_position/rel_alt
/uav1/mavros/global_position/set_gp_origin
/uav1/mavros/gps_rtk/send_rtcm
/uav1/mavros/home_position/home
/uav1/mavros/home_position/set
/uav1/mavros/imu/data
/uav1/mavros/imu/data_raw
/uav1/mavros/imu/diff_pressure
/uav1/mavros/imu/mag
/uav1/mavros/imu/static_pressure
/uav1/mavros/imu/temperature_baro
/uav1/mavros/imu/temperature_imu
/uav1/mavros/local_position/accel
/uav1/mavros/local_position/odom
/uav1/mavros/local_position/pose
/uav1/mavros/local_position/pose_cov
/uav1/mavros/local_position/velocity_body
/uav1/mavros/local_position/velocity_body_cov
/uav1/mavros/local_position/velocity_local
/uav1/mavros/log_transfer/raw/log_data
/uav1/mavros/log_transfer/raw/log_entry
/uav1/mavros/mocap/pose
/uav1/mavros/param/param_value
/uav1/mavros/setpoint_accel/accel
/uav1/mavros/setpoint_attitude/cmd_vel
/uav1/mavros/setpoint_attitude/thrust
/uav1/mavros/setpoint_position/global
/uav1/mavros/setpoint_position/local
/uav1/mavros/setpoint_velocity/cmd_vel
/uav1/mavros/setpoint_velocity/cmd_vel_unstamped
/uav1/mavros/state
/uav1/mavros/statustext/recv
/uav1/mavros/statustext/send
/uav1/mavros/target_actuator_control
/uav1/mavros/time_reference
/uav1/mavros/timesync_status
/uav1/mavros/trajectory/desired
/uav1/mavros/trajectory/generated
/uav1/mavros/trajectory/path
/uav1/mavros/vision_pose/pose
/uav1/mavros/vision_pose/pose_cov
/uav1/mavros/vision_speed/speed_twist_cov
rostopic echo -n1 /diagnostics
header:
seq: 481
stamp:
secs: 1553764708
nsecs: 689837892
frame_id: ‘’
status:
level: 0
name: "uav1/mavros: FCU connection"
message: "connected"
hardware_id: "/dev/ttyUSB0:115200"
values:
-
key: "Received packets:"
value: "4051"
-
key: "Dropped packets:"
value: "0"
-
key: "Buffer overruns:"
value: "0"
-
key: "Parse errors:"
value: "0"
-
key: "Rx sequence number:"
value: "35"
-
key: "Tx sequence number:"
value: "199"
-
key: "Rx total bytes:"
value: "152697"
-
key: "Tx total bytes:"
value: "1629470"
-
key: "Rx speed:"
value: "694.000000"
-
key: "Tx speed:"
value: "7960.000000"
-
level: 2
name: “uav1/mavros: GPS”
message: “No satellites”
hardware_id: “/dev/ttyUSB0:115200”
values:
key: "Satellites visible"
value: "0"
- key: “Fix type”
value: “0”
- key: “EPH (m)”
value: “Unknown”
- key: “EPV (m)”
value: “Unknown”
-
level: 0
name: “uav1/mavros: Heartbeat”
message: “Normal”
hardware_id: “/dev/ttyUSB0:115200”
values:
key: "Heartbeats since startup"
value: "316"
- key: “Frequency (Hz)”
value: “1.000014”
- key: “Vehicle type”
value: “Quadrotor”
- key: “Autopilot type”
value: “PX4 Autopilot”
- key: “Mode”
value: “MANUAL”
- key: “System status”
value: “Standby”
-
level: 2
name: “uav1/mavros: System”
message: “Sensor helth”
hardware_id: “/dev/ttyUSB0:115200”
values:
key: "Sensor present"
value: "0x0006002F"
- key: “Sensor enabled”
value: “0x0021000B”
- key: “Sensor helth”
value: “0x0006002F”
- key: “3D gyro”
value: “Ok”
- key: “3D accelerometer”
value: “Ok”
- key: “absolute pressure”
value: “Ok”
- key: “rc receiver”
value: “Fail”
- key: “AHRS subsystem health”
value: “Fail”
- key: “CPU Load (%)”
value: “29.0”
- key: “Drop rate (%)”
value: “0.0”
- key: “Errors comm”
value: “0”
- key: “Errors count #1”
value: “0”
- key: “Errors count #2”
value: “0”
- key: “Errors count #3”
value: “0”
- key: “Errors count #4”
value: “0”
-
level: 0
name: “uav1/mavros: Battery”
message: “Normal”
hardware_id: “/dev/ttyUSB0:115200”
values:
key: "Voltage"
value: "15.34"
- key: “Current”
value: “0.2”
- key: “Remaining”
value: “67.0”
 Did you make any progress?
Did you make any progress?