Hello,
Question about hold mode as a failsafe for manual control loss. When manual control loss occurs and the drone goes into hold mode, what are the values for manual control inputs set to when this happens?
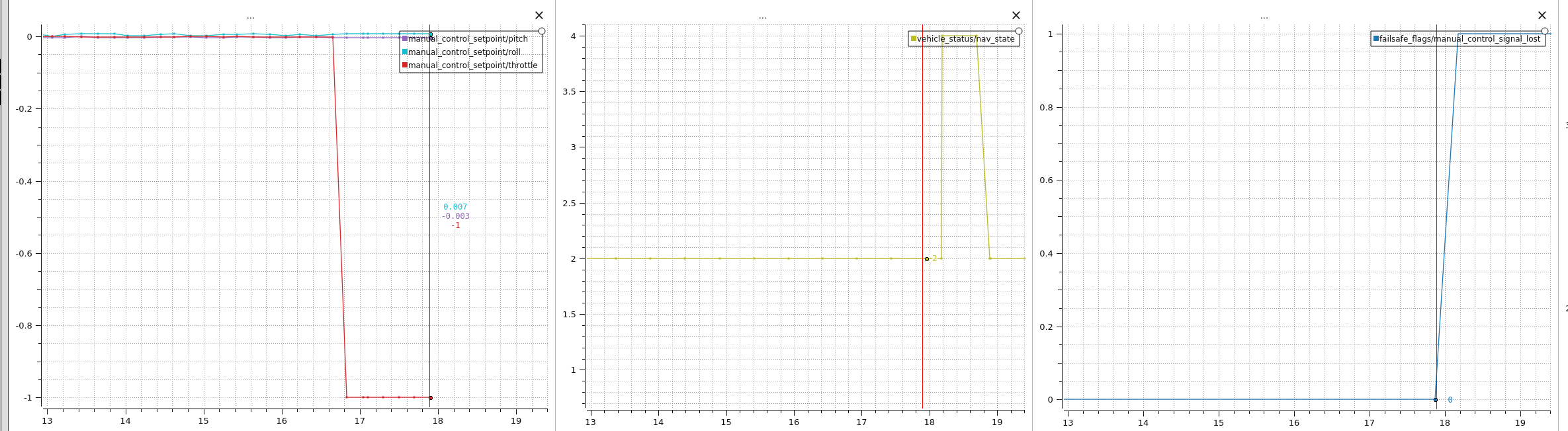
I think I am seeing strange behavior, but this could be the expected behavior and I am just adding complexity where it is not. I am looking at the log in flight review and see that the manual control has the throttle set to negative while the controller is disconnected.
http://flight-review.modalai.com/plot_app?log=539b5027-ddd4-4830-baab-34794e671322

I had a wild thought that maybe the manual control values were defaulting to to values that are available at arm but nothing in the code suggest that to be the case. The simplest answer is probably correct but just to be sure.
Thank you for your time,
Aaron Porter