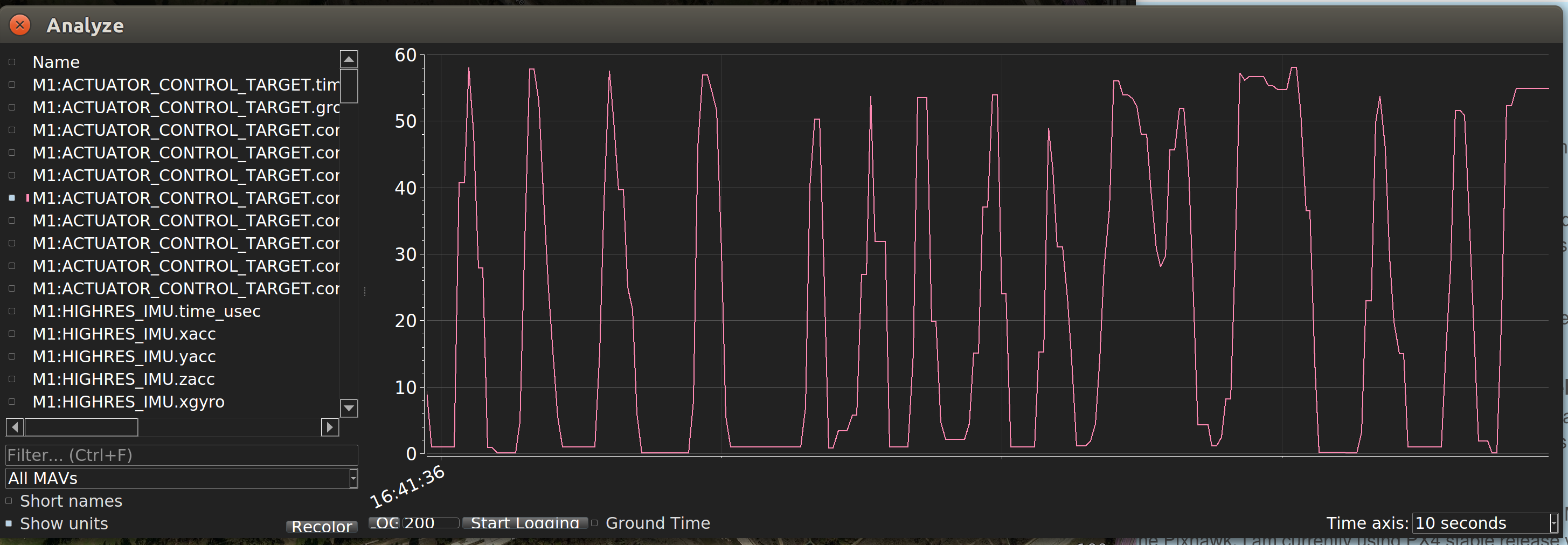
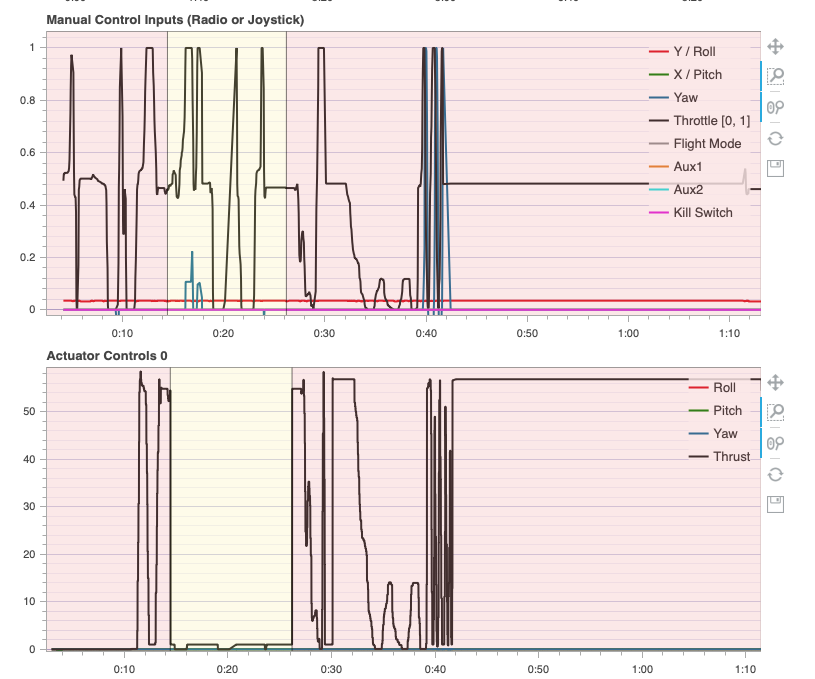
I’ve built the stable firmware for a v3 target. When I’m in manual mode I’m getting some strange behavior from the throttle. The actuator_controls_0[3] (which I expect to be thrust), gives a value of ~58 when the stick is centered and near 0 at full stick up or down.
I’d expect a value around 1.0 at full stick up. This is what I see in SITL.
Here is the plot of me moving the throttle stick full up and down (note the peak occurs during center stick).