Since Flight Review has been down now for over 24 hours, I’ve decided it was time to get around to making a Mission Planner style log field plotter. I’ll probably add it to my collection of log file analysis scripts - available on GitHub.
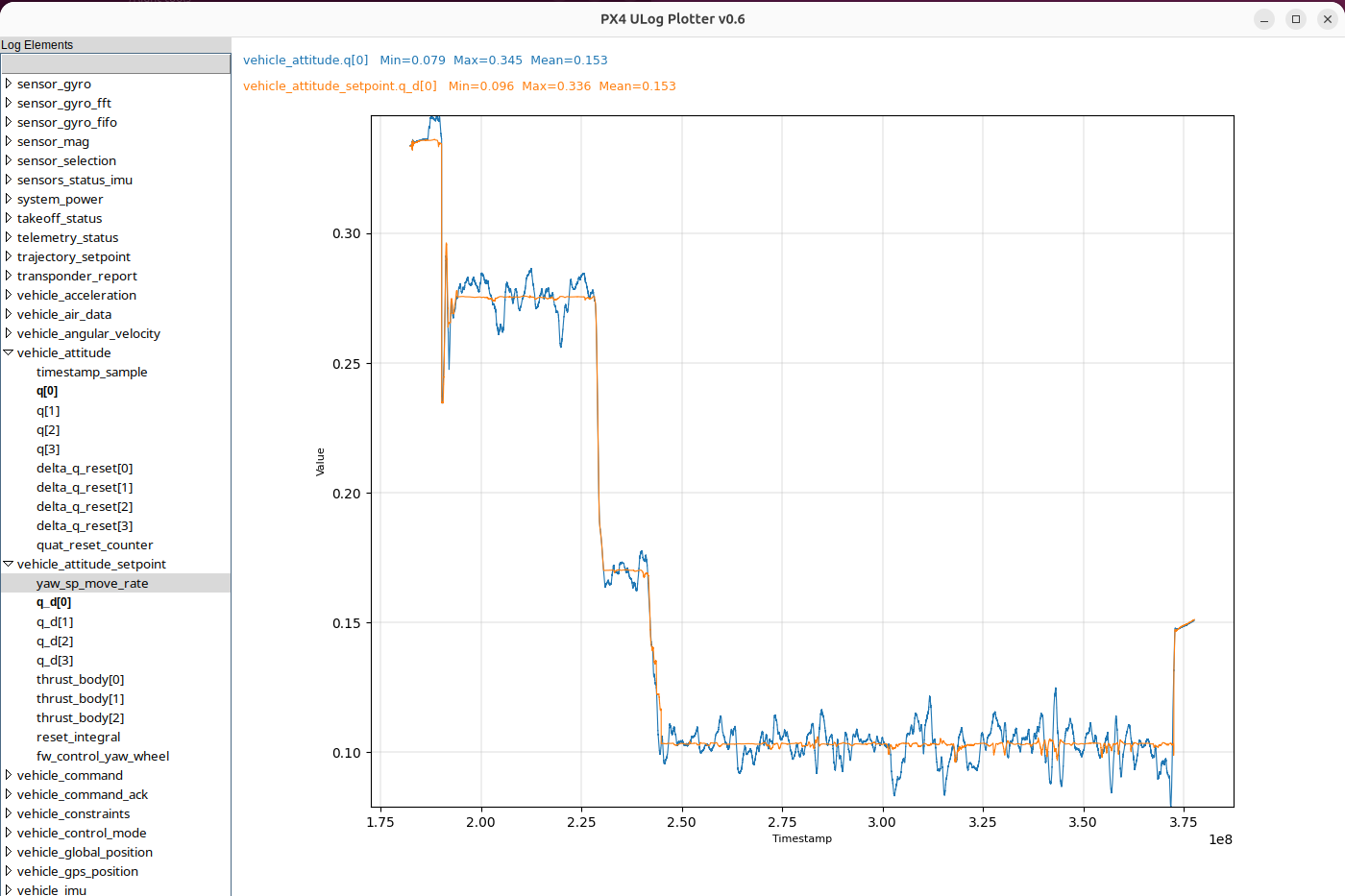
It’s interesting what you learn when “under the hood” - PX4 uses quaternions instead of euler angles to record desired and actual position on pitch, roll and yaw.
After about 5 years using ArduPilot, I decided to take a look at PX4. The PX4 Flight Review website is helpful - but has no access to raw data. In fact, as I became more familiar with exactly what’s stored in PX4 log files, I realized that much of the data reported on PX4 Flight Review was “synthetized.” For example, it’s vibration metrics plot does not break each of the X, Y, and Z axis.
To learn more I began writing some of my own Python scripts to examine certain log file elements. I’ve put them up on github, and have a server that allows using most of them on line. You can find access to all that on my website. Flight-Tools | Copter Cam Tech
Through all this I never had time to take a look at Plot Juggler - but I knew it was out there.
When the PX4 Flight Review website was down for a few days, I decided it was time to write my own log file plotter program - that works with PX4’s .ulg file is a similar way that Mission Planner and MavExplorer work with ArduPilot .bin files.