My setup is:
QGC 3.5.6
Pixracer FC 1.9.2
Matek M8Q-5883 external GPS + compass
Rover
FC, ext. mag and vehicle all facing same direction. (rotation_none)
No magnetics nearby, ext. mag. is 6" above FC and 10" above motor.
Cannot arm because “compass sensors inconsistent” or “primary compass not found”
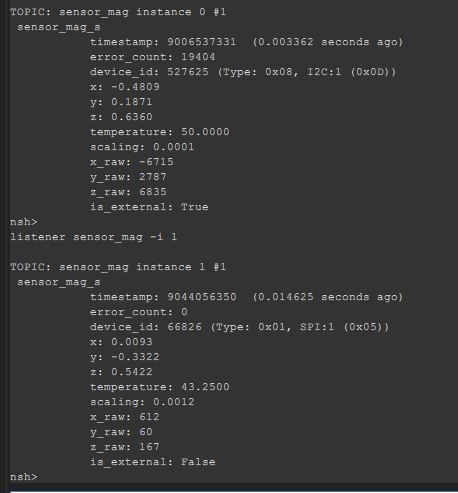
Per the image below, I believe that my external compass is 0 and internal compass is 1
If I try to disable internal compass 1, I get an Emergency:Mag1 fail:timeout
I have tried various combinations of enabling and disabling mags 0 thru 3 without success.
If I disconnect the external compass and do a compass calibration, I get all green, so I must be calibrating mag 1 internal compass.
- How can this calibration be true if mag 1 is disabled?
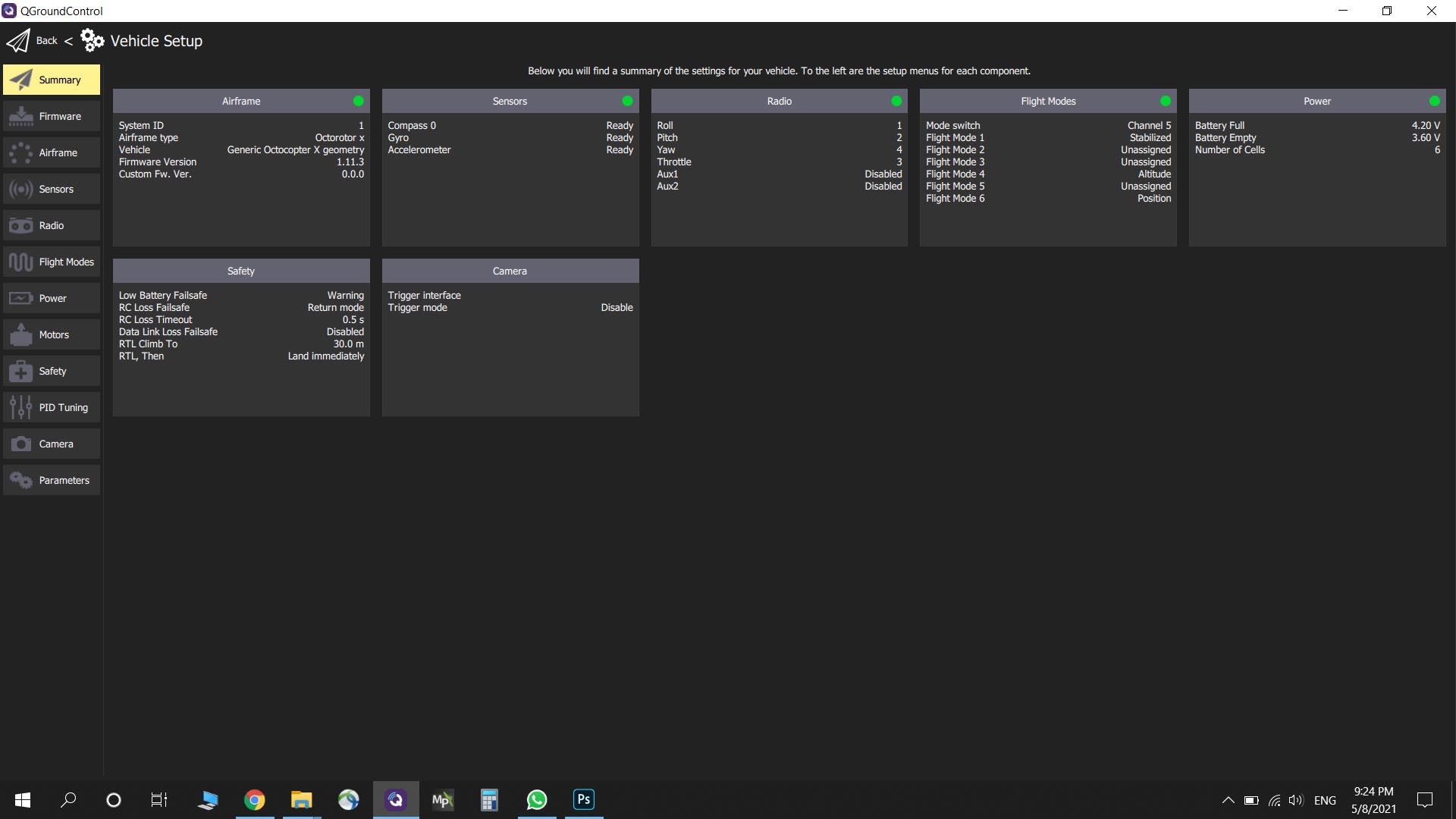
- Why does summary show all mags “ready” when it should show enabled or disabled similar to radio?
- Why does flight map show compass 90 degrees off ( E when rover is pointing S)?
- Why do I get “primary compass not found” when I attempt to arm? (Mag 0 enabled, Mag 1 disabled)
- Is the “primary” compass the internal compass, external compass or ??
Any and all help appreciated.