I am using a Pixhawk Cube and I have some problems to arm my vehicule.
The error message is “preflight failed compass inconsistent” or “accel inconsistent - check cal” or " Primary compass not found".
I redo the calibration several time with only the USB link and the GPS Here 2 Combo connected. There is no magnetic interference when I do calibration because my battery is far from the pixhawk
Sometimes it woks for a while but the problem reappears.
How can I solve this problem ?
Is there a way to disable compass from preflight check ?
I tried to disable the parameter CAL_MAG1_EN (and other number) but it did not change anything.
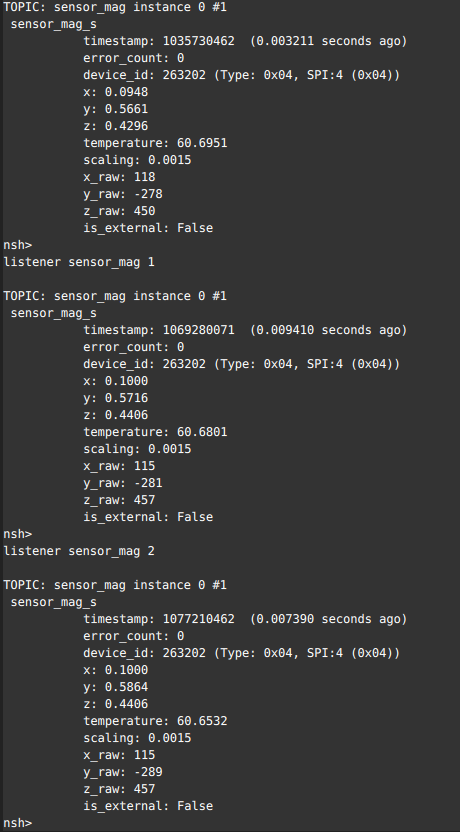
When I do the command “ls /obj”. I have sensor_mag0; sensor_mag1 and sensor_mag2.
I don’t see any compass which is external (see photo attached) . But I can see only one instance (0) for the three magnetometers. I don’t know how to listen another topic as the command “listener sensor_mag2” did not match any known topics
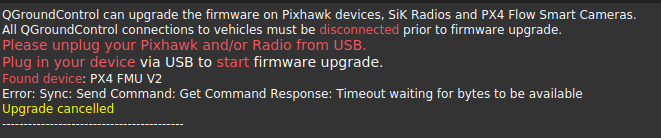
pixhawk cube use px4 fmu v3, you can install it using the option in QGC “custom firmware”, you can find the file in px4 firmware releases.
Just in case you still have the same error, you have corrupted the bootloader with the previous installation, and for recover it you need a swd/jtag programmer
Yes, you need to mount your external compass on the aircraft and ensure it is as far away as possible form all DC power lines. You also need to set your autopilot and external magnetometer orientation during the calibration. If they aren’t oriented the same they will show different measurements of the 3D magnetic field hence the “mags inconsistent”.
The “MAGS INCONSISTENT” warning means that the magnetic field measured by all the magnetometers (external and internal) are too far off from each other. You can change the threshold for this by adjusting the COM_ARM_MAG parameter.
Also, when you calibrate, make sure you are far away from any ferrous objects (engine blocks, fences, etc) and DC power lines.
Yes, increasing COM_ARM_MAG works. Just be advised that you are allowing the aircraft to arm with a less trust worthy magnetometer reading. I would try small increases and go with the small value you can consistently arm with.