Hi all, I’m trying to tune my PID just now and I have only managed to tune Roll and Pitch before my battery dies.
Below is my PID log and can anyone please help on how I can improve my PID? Whether to increase or decrease
Please see here:
https://docs.px4.io/master/en/log/flight_review.html
and here:
https://docs.px4.io/master/en/config_mc/pid_tuning_guide_multicopter.html
Also what air frame are you useing?
Hi @jimdgit thanks for responding.
I am using F450, Pixhawk 2.4.8, Rpi 4 and PiCamera.
I read the page, and I spot possibly one reason could be high vibration. What else?
It would be best if you post a link to the log it self.
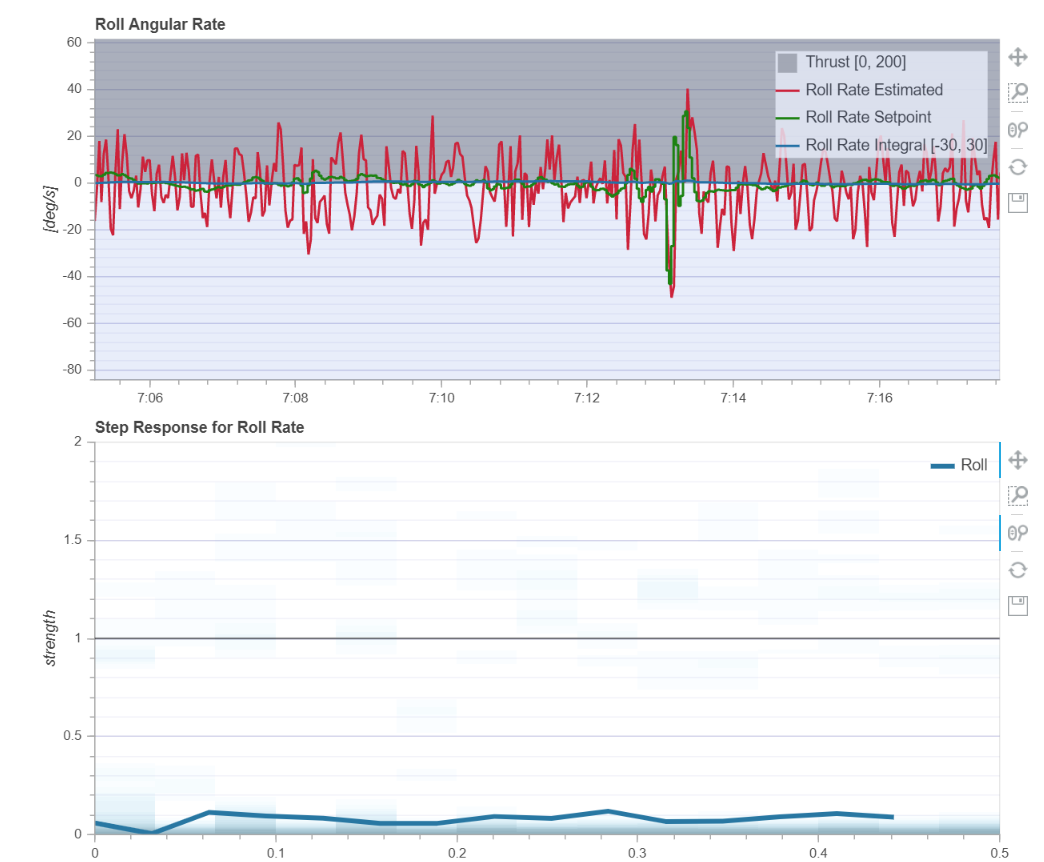
The pitch rate seems to need more P at first on the rate controller.
The roll - not sure what a flat line like that means.