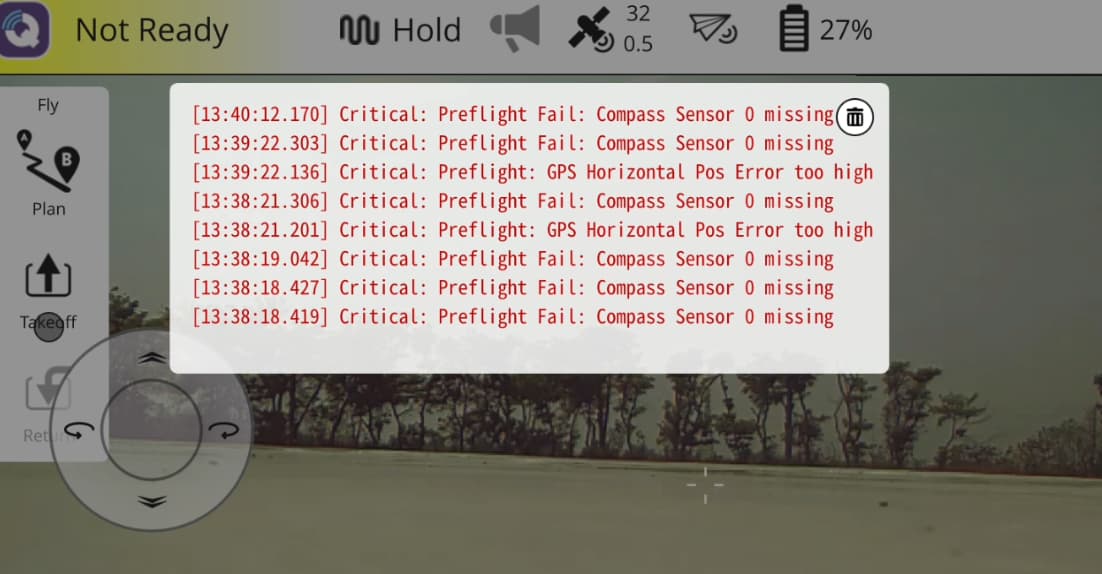
I am experiencing an issue with arming my drone in different modes (Stabilized, Hold, and Manual) when the ekf2_mag_type is set to none . The preflight error message I receive is “Preflight Fail: Compass Sensor 0 missing.”
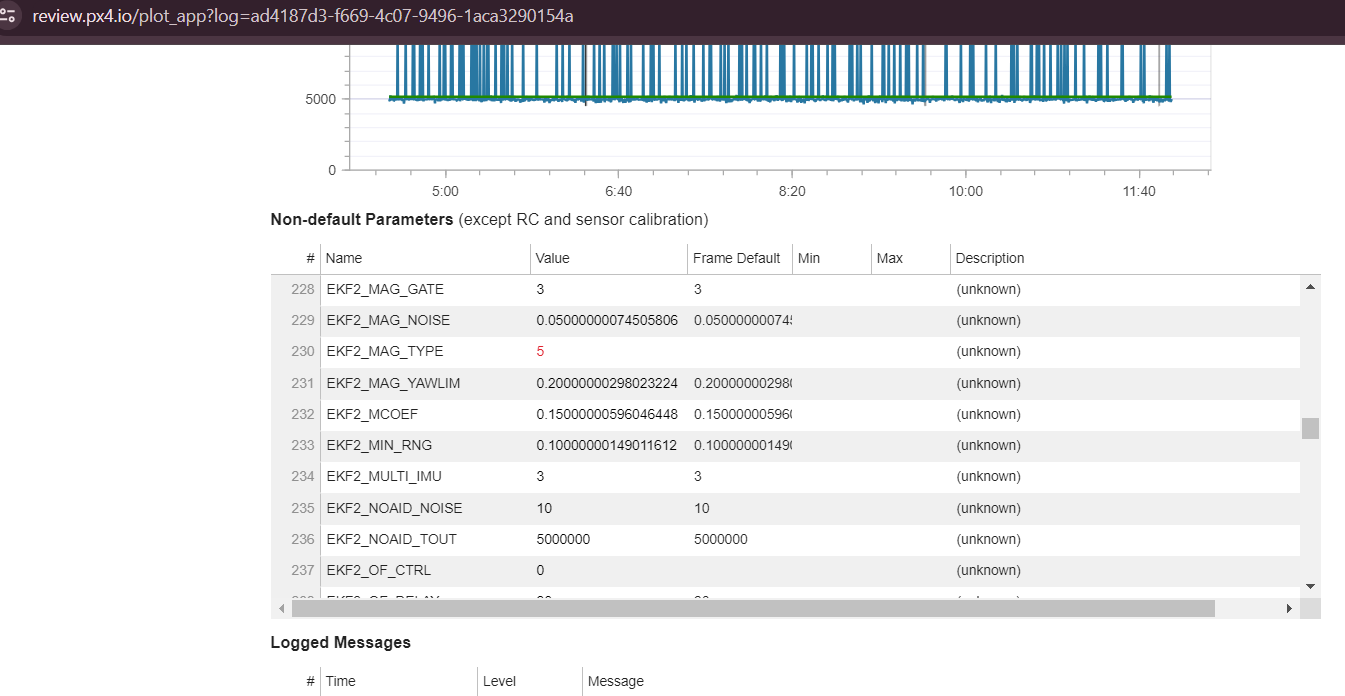
From the flight review logs, it’s evident that the ekf2_mag_type value is set to 5 and the attempted arming mode was Stabilized.
https://review.px4.io/plot_app?log=ad4187d3-f669-4c07-9496-1aca3290154a
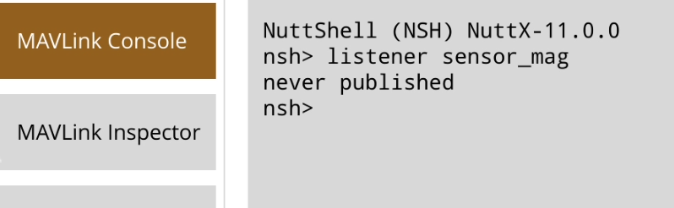
Additionally, when I checked the sensor_mag topic using the MAVLink console in QGroundControl with the command listener sensor_mag , the output was “never published.”
I have come across a discussion suggesting that without a heading source, arming might not be possible.
But the drone operates normally when controlled via a Futaba remote controller, which suggests the hardware itself is functioning correctly.
Is there a way to configure QGroundControl (QGC) to arm the drone just like when using a Futaba remote controller?