The AUAV X2.1 is all about lessons learned. The X2 was a very successful board but there was still room for improvement. Following the PixRacer project we had time to invest into making the X2 the high quality PixHawk replacement we intended it to be. Major changes include: updated IMU sensors, power supply has been redesigned, headers have been laid out more logically, remote USB connector, industry standard 30.5mm mounting points.
New Power OR-ing schematic with reverse voltage protection. 5V power module is required!
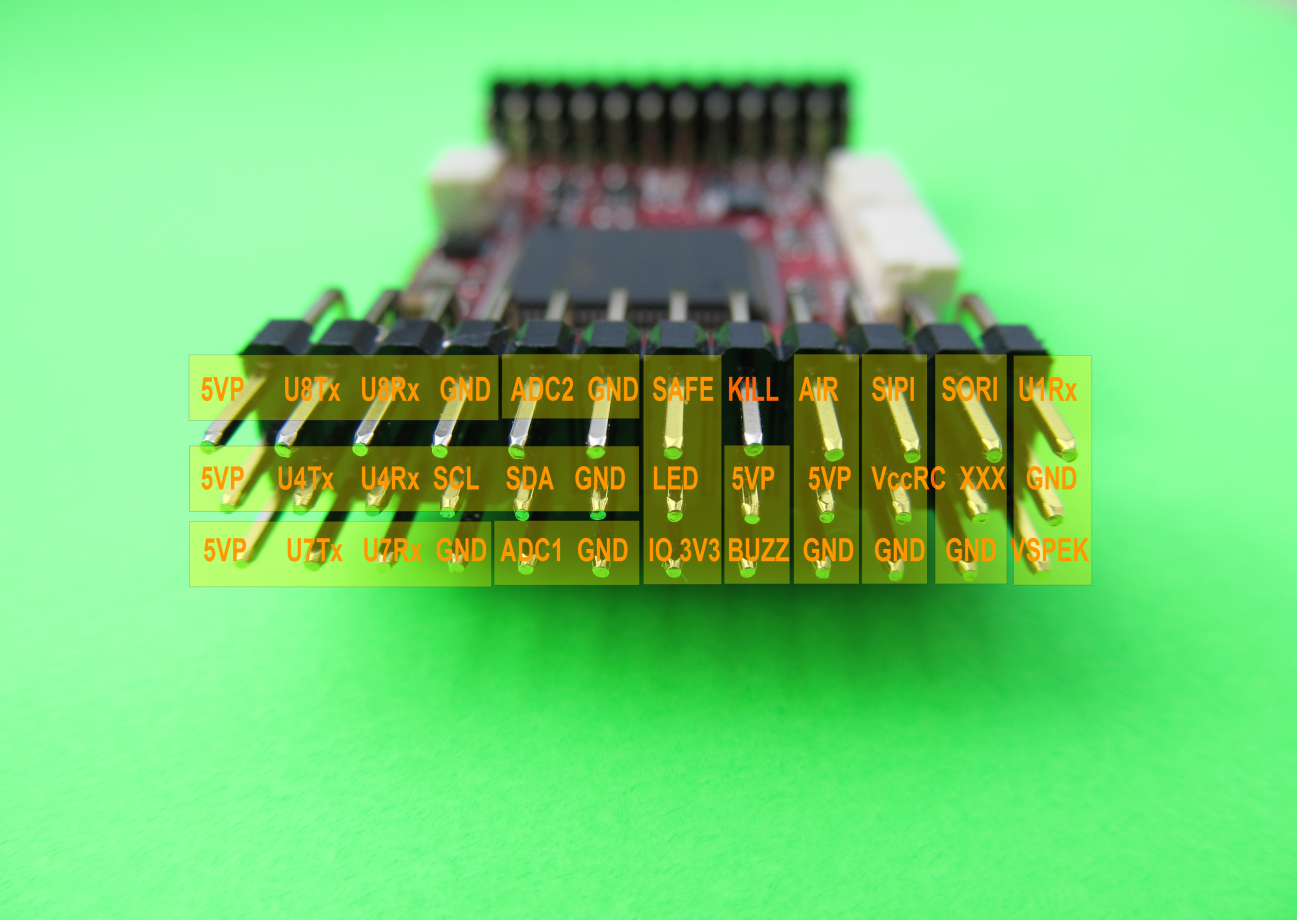
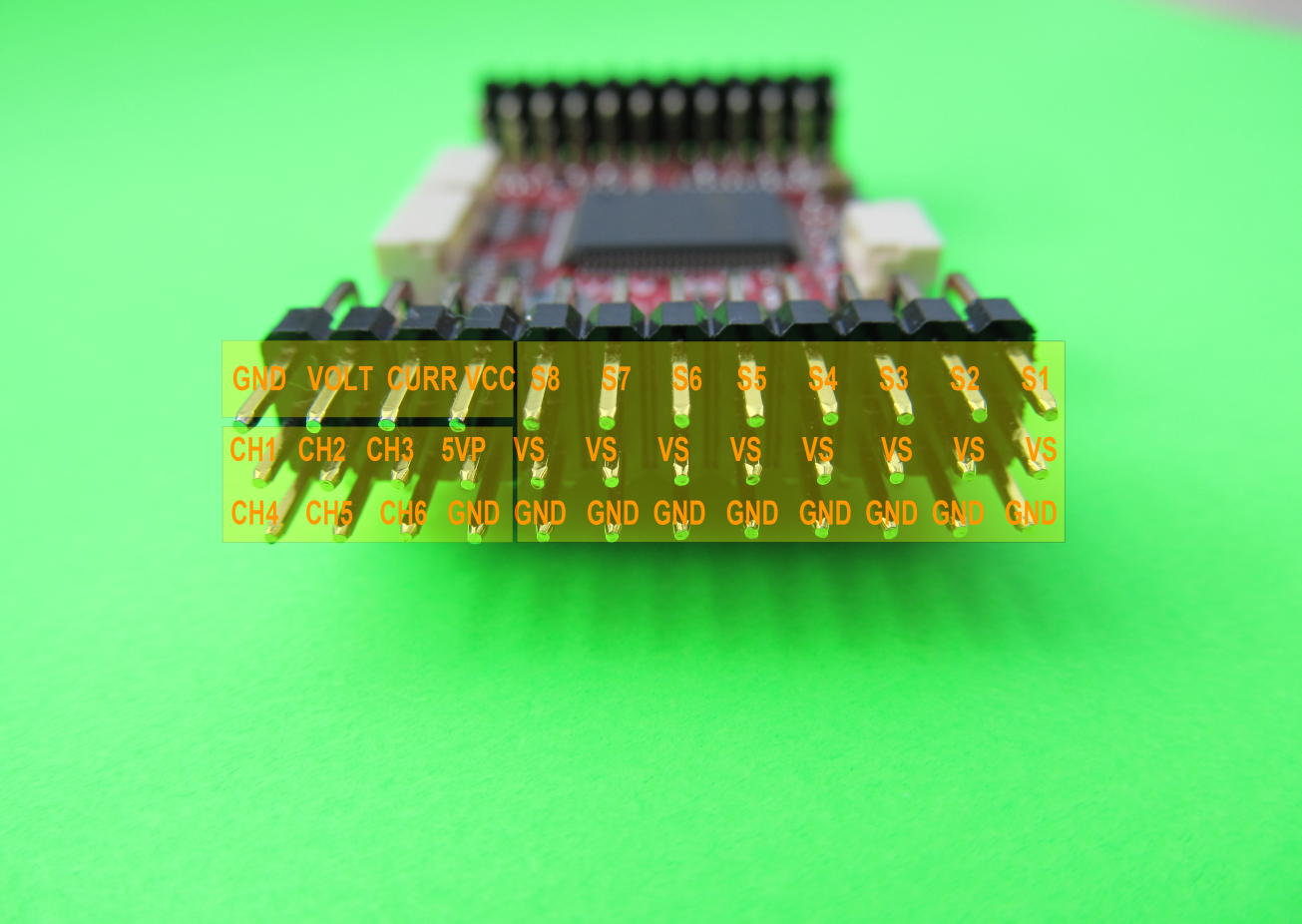
Connections:
2.54mm headers:
GPS (USART4)
i2c
RC input
PPM input
Spektrum input
RSSI input
sBus input
sBus output
Power input
Buzzer output
LED output
8 x Servo outputs
6 x Aux outputs
USART7 (Console)
USART8 (OSD)
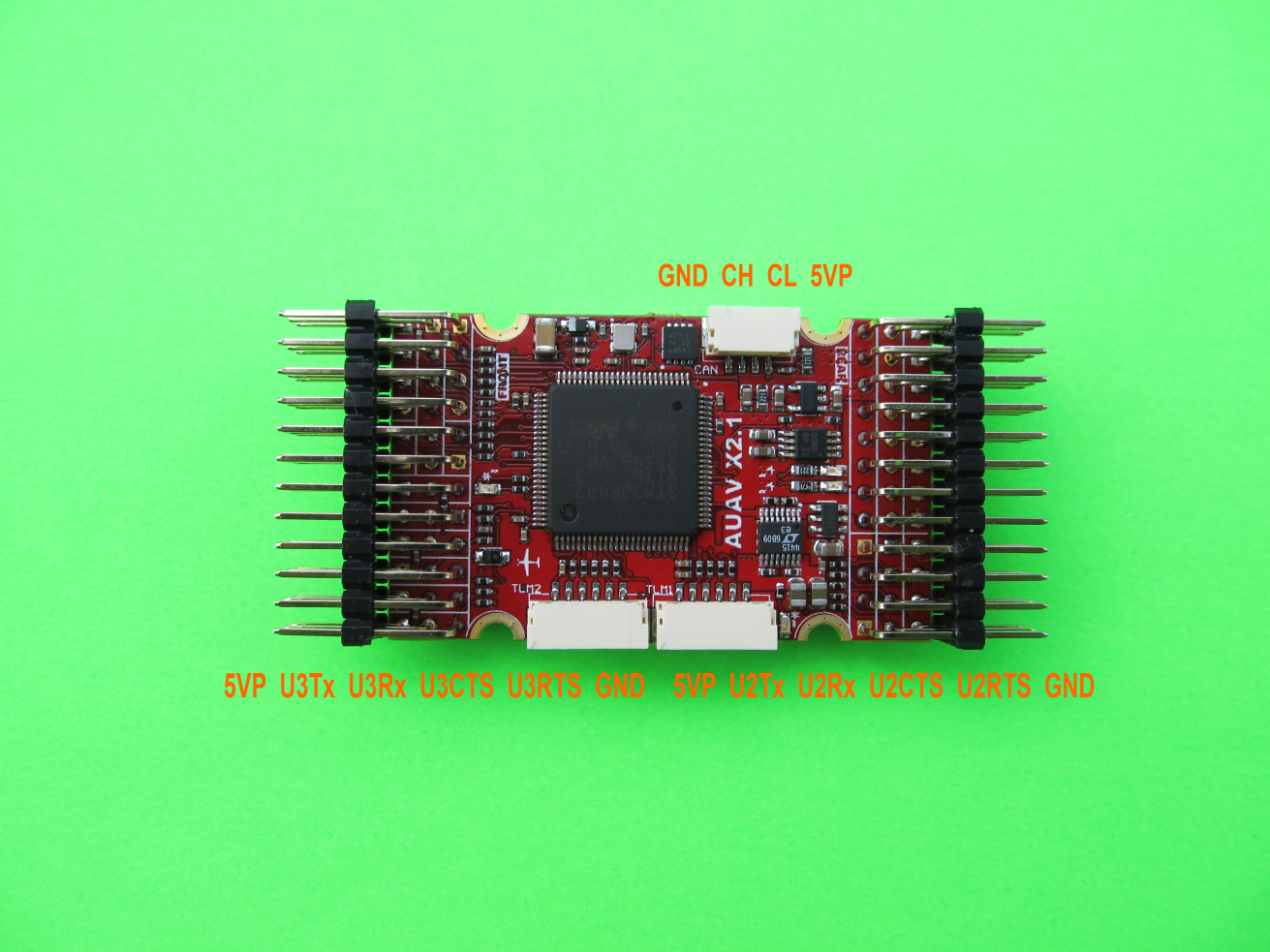
JST GH connectors:
CAN
USART2 with flow control (Telem 1)
USART3 with flow control (Telem 2)
USB (150mm GH to Micro USB cable included for convenient mounting)
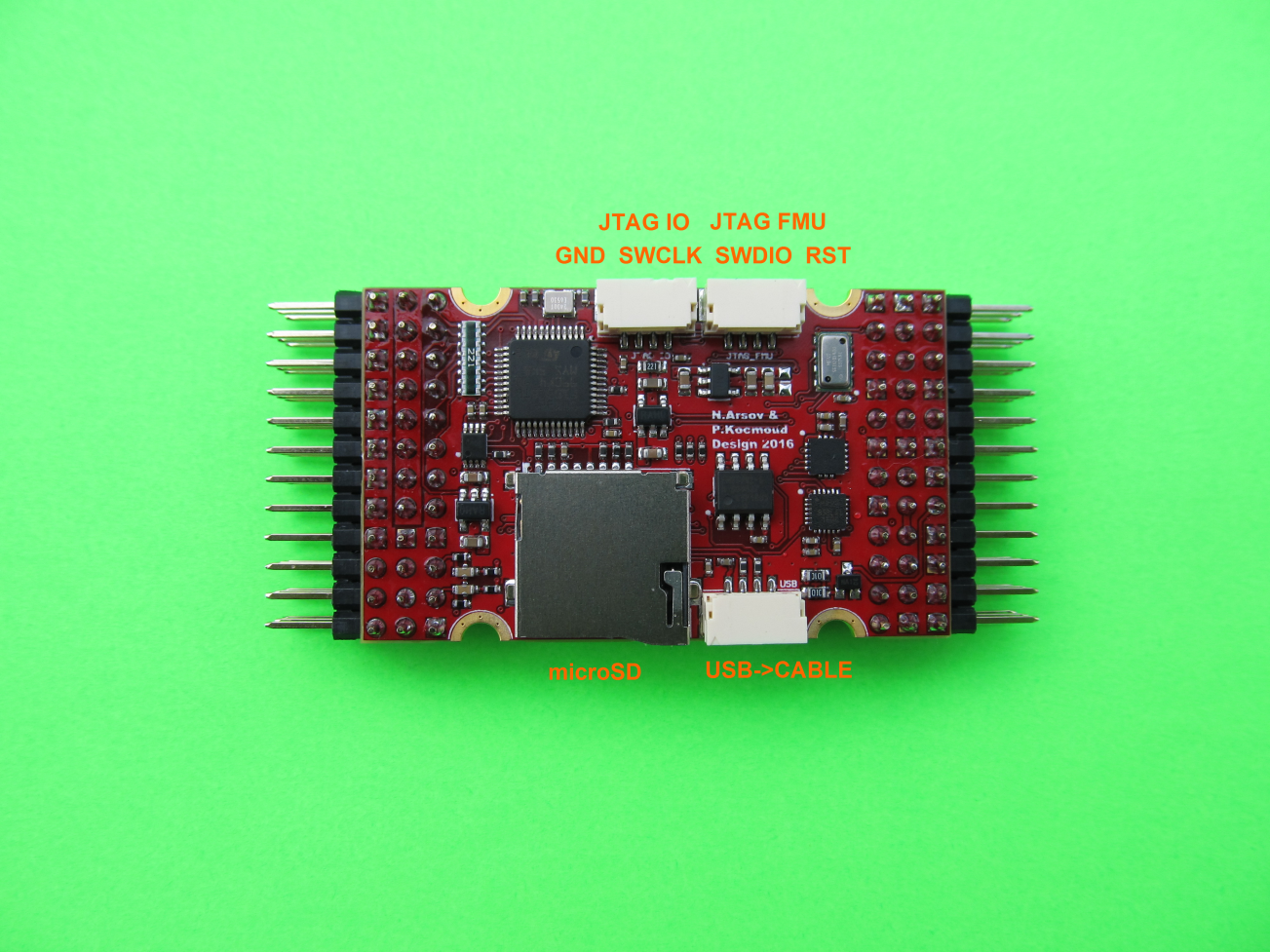
JTAG FMU Processor
JTAG IO Processor
Nice! Please make sure to sync with me on the boot loader. I want to make sure users can use the 2MB flash and that will require proper identification in the bootloader and a new Firmware config.
KILL is not connected currently and will be used in the future.
SORI = SBus Out / RSSI IN
SIPI = SBus IN / PPM IN
Both signals have 100% the same function as of Pixhawk.
The main differences between X2 and X2.1 are:
Sensors - X2.1 uses MPU9250, ICM20608 ( baro is the same - MS5611 )
Power manager - X2.1 uses LTC4415 for Brick/USB OR-ing, plus MOSFET for reverse polarity protection
The new board looks good Phil! I like the usb connector, creates easy access to connect to, the one thing I always have trouble with in the first version. Great job!