Hi all,
today I got a brand new AUAV-X 2.1 (link) probably the first production batch.
A few things to note and a few Questions. This is Board is recognized as FMUv2 FC with a few particularities:
- This FC features 2 IMU : ICM20602 and MPU9250
- Despite the Manual describes a standard PX 4 Installation, with current Master no IMU is recognized. As far as I have seen for ICM 20602 the MPU6000 Driver can be used but this is foreseen only in FMUv5.
- After starting the MPU9250 Driver, I had to set 90°YAW for the Sensor in order to have a correct Board ↔ IMU alignment.
So how could I modify the Boot Scripts to start those drivers? I have not yet figured out where the individual Config resides apparently not in /etc/init.d/6001_x_hexa (in my case it will be a Hexacopter). I assume startup scripts a platform dependent. Can somebody guide me to this location?
Ok, I figured some things. If I understand rc.sensors Script correctly it will try to look for hwcmp AUAV_X21 assuming that hwcmp corresponds to the Output from ver all → HW Arch where my AUAV-X2.1 identifies itself as PX4FMU V2. I assume this information is fetched from the Boot Loader?
So I tried to perform the steps described in rc.sensors manually. They are:
External I2C bus
hmc5883 -C -T -X start
Internal SPI bus ICM-20608-G is rotated 90 deg yaw
mpu6000 -R 2 -T 20608 start
Internal SPI bus mpu9250 is rotated 90 deg yaw
mpu9250 -R 2 start
The Output is not very encouraging:
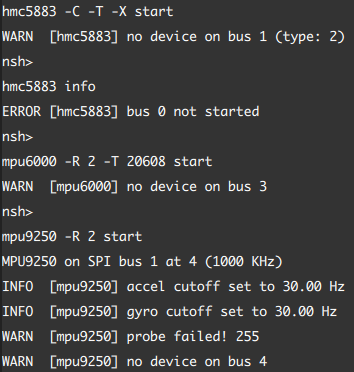
mRobotics also lists ICM20602 instead of 20608… maybe a last minute change in Production? Nevertheless mpu6000 -R 2 -T 20602 start does not work either.
Performing MPU9250 test works every second time and any other time kind of disconnects the IMU from the OS.
Any help on this is appreciated.