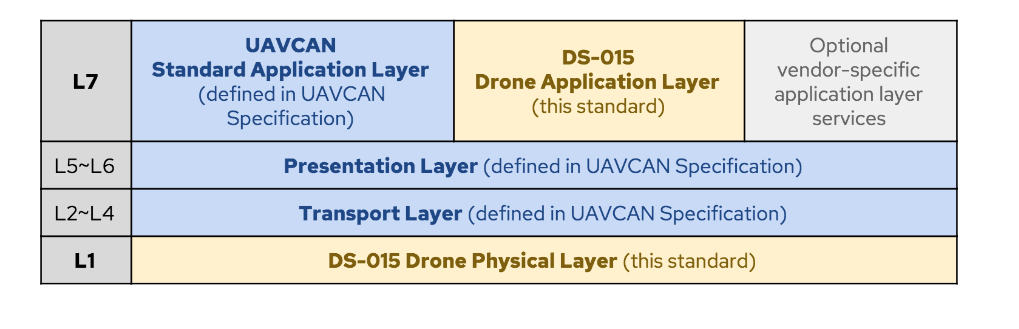
DS-015 UAVCAN Drone Standard, which defines the standardized application layer for drones and the suitable physical connectivity layer optimized for unmanned vehicles using UAVCAN v1 networks, is now available on Github in the Dronecode repository (v0.8 draft):
https://github.com/Dronecode/SIG-UAVCAN-Drone
This is a milestone for the continued collaborative work done by the UAVCAN Drone Special Interest Group(SIG). The SIG is lead by Dronecode Foundation members Auterion, NXP, and Zubax Robotics, with collaboration from other industry partners and open source maintainers.
Special thanks to @TSC21 and @PavelKirienko for driving this to a published state for the community! The official release v1.0 is planned to be launched Wed, Nov 11.
In the standard doc, you will find the general architecture and recommendations, while the data types and network services definitions can be found in the UAVCAN/public_regulated_data_types repo.
To make any comments to the current draft before the final official release, please post to this thread: https://forum.uavcan.org/t/ds-015-uavcan-drone-standard-v1-0-rfc/971
For further information, to join and support the effort of the SIG, please use any of the following methods to get in touch:
- Use the UAVCAN forum category related to the UAVCAN Drone Special Interest Group - https://forum.uavcan.org/c/sig/drone-sig/17 - and open a new discussion topic (recommended)
- Open an issue in the DS-015 UAVCAN Drone Standard repository - https://github.com/Dronecode/SIG-UAVCAN-Drone
- For questions related to the data types or the network services, ideally use the UAVCAN forum, but you can also open an issue in the
UAVCAN/public_regulated_data_typesrepo - GitHub - OpenCyphal/public_regulated_data_types: Regulated DSDL definitions for Cyphal (standard and third-party)