Hello all,
I used to fly bigger drones outdoor with GPS but indoor flying is quite challenging to me.
I was trying to fly small quad in indoor position hold mode with Firmware version 1.8.0dev latest cloned master.
PX4FLOW and sonar are connected via i2c and pwm in respectively.
Followings are set up I changed.
EKF2_AID_MASK set to 2
EKF2_RNG_AID set to enabled
SENS_FLOW_ROT set to Yaw 270’
MPC_ALT_MODE set to Terrain following
All sensor data looks fine but whenever set to position hold. It automatically refuse to fly and become altitude hold mode.
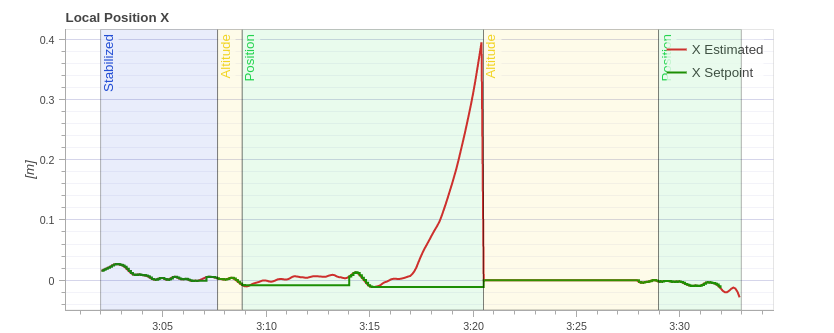

Log is located here.
https://logs.px4.io/plot_app?log=7082fd94-8788-4b24-a51c-3abc41ab22d2
Can anybody have experience with this kind of setup? please help me find solution.
Kyu