- Drone type: QUAD
- FC: Pixhawk 1
- Build: px4fmu-v2_default 1.8.0 stable build with make
-
Sensor Hardware:
- px4flow for xy estimation
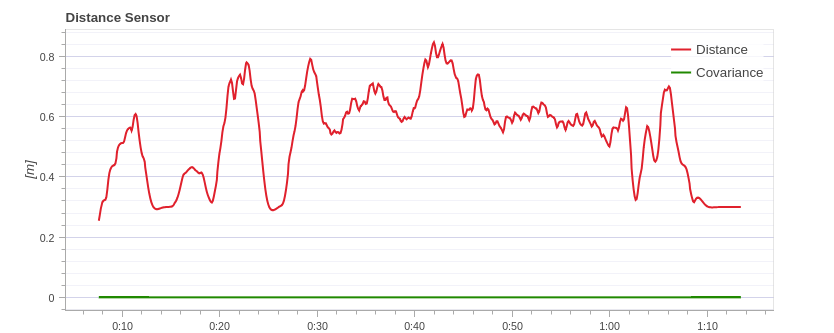
- Sonar: pwm input range sensor
- Flying environment: Indoor with flat floor.
Altitude hold was perfectly normal with barometer setup.

Log is here Flight Review
When EKF2_RNG_AID is enabled, my drone never stabilized for altitude hold and at some point, it shoots to the roof.
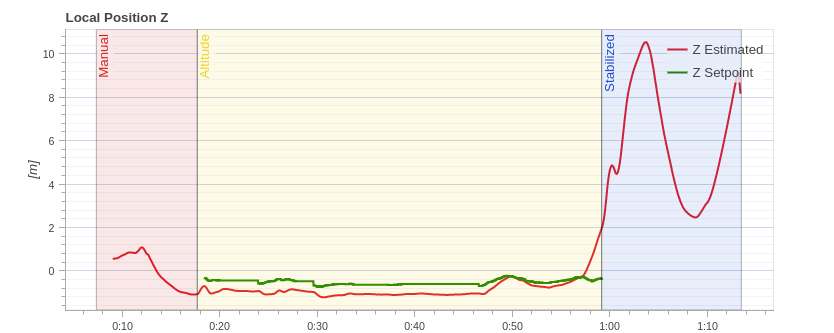
while range sensor data gives good estimation.
Log is here Flight Review
Whether terrain following mode is on or off, results are pretty much same.
What part should I have to look at?
Any thought and advise would be much appreciated.
Thanks,
Kyu