I am using the pxhawk6x rt and micoair mtf-01p to achive indoor poshold, the drone is very stable and responsive in both stablise and altitude hold mode but as soon as i enter POS HOLD it oscillates a lot. Sometime i also get the error of accl2 clipping.
Firmware:1.15.4
Frame : Holybro X500v2
Please upload a log to logs.px4.io and link it here. Otherwise, it’s hard to know what is going on.
Hello i have uploaded the file.log

the problem is that it only happens in pos hold, here is the log of the same drone flying in altitude hold indoors and i even gave it jerky inputs on purpose and it was still very smooth, the problem only occurs as soon as i switch to POS Hold
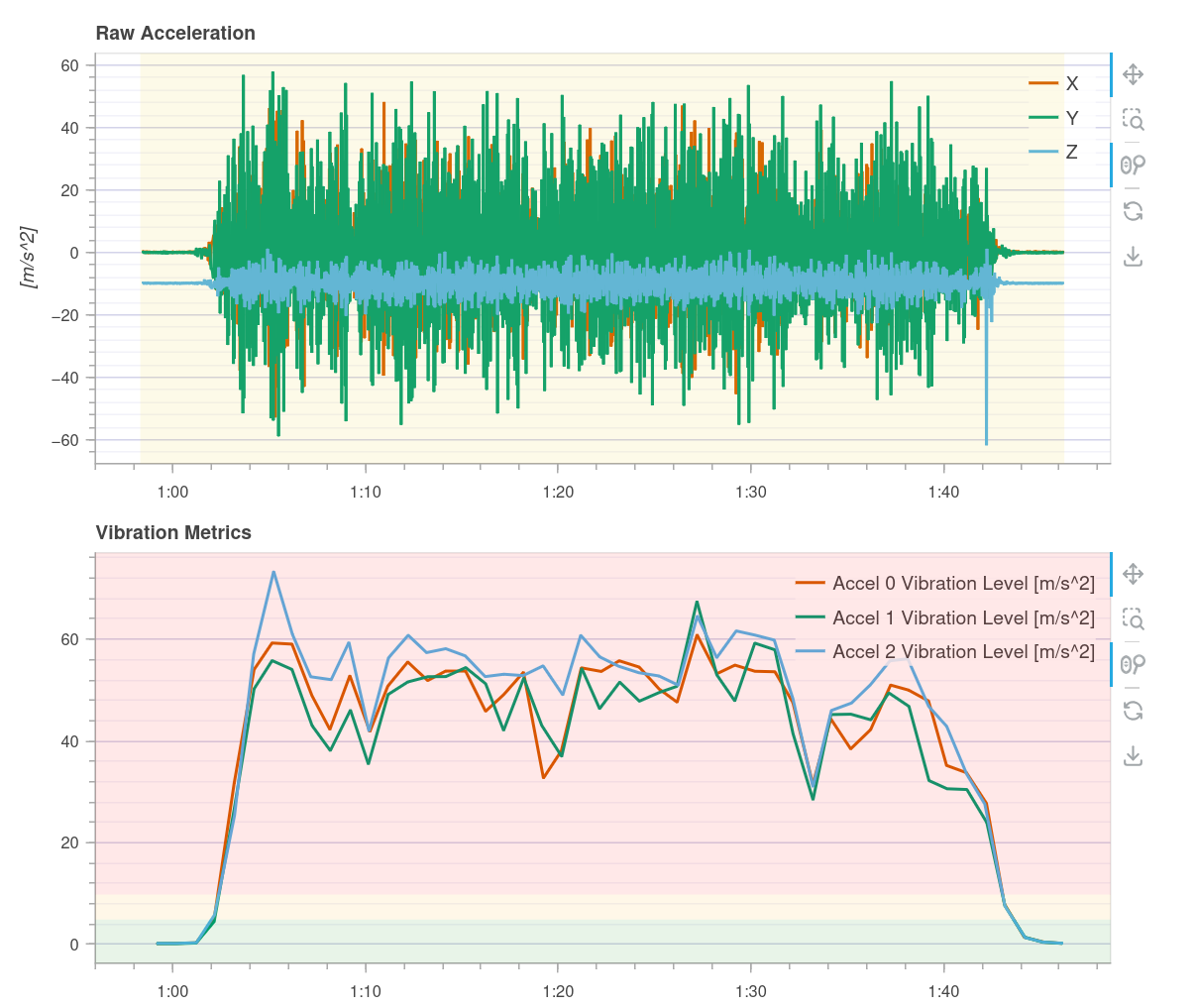
I have added a vibration damper and the performance is much better. here is the log.
1 Like
Yes, that looks indeed quite a bit better!